I was doing experiments with arduino UNO and different stepper motors. Surprisingly, I didn’t get satisfactory results. The 3 stepper motors that I have, did not work properly with arduino stepper motor library provided with the arduino IDE software. The problems were -:
• Sometimes they rotate, sometimes don’t
• They do not rotate to the exact angle that I want
• The RPM (speed) at which motor rotates, that is completely different from what is entered in program
• The motor does not rotate to the desired number of rotations or to even specified angle
So, finally, I conclude – the stepper motor library and its functions given is built in arduino IDE, are not compatible with all kind of stepper motors – especially unipolar stepper motors.
I decided to create a universal kind of arduino library for all unipolar stepper motors. My requirements are straight forward that -:
• It should control any unipolar stepper motor with 4 phase.
• It should control unipolar stepper motor with any step angle – step resolution
• It should accurately control stepper motor rotation, angle, RPM and direction
• There should be enough flexibility and facilities to control the stepper motor in any manner.
So, here I present Unipolar Stepper library in Arduino for all unipolar type stepper motors having 4 phases. The library has 9 different functions that can be used to rotate and control motor as per the requirements. The library is designed as per the industrial motion control requirements. Here are some of the features of this library -:
1.Controls any unipolar stepper motor with 4 phases.
2. Controls direction of rotation of motor
3. Accurately controls a number of revolutions of the motor like 1, 2, 3, 4,…..
4. Accurately controls motor speed in RPM with 95% accuracy
5. Accurately rotates motor to desire angle between 0 – 360o with 80-100% accuracy
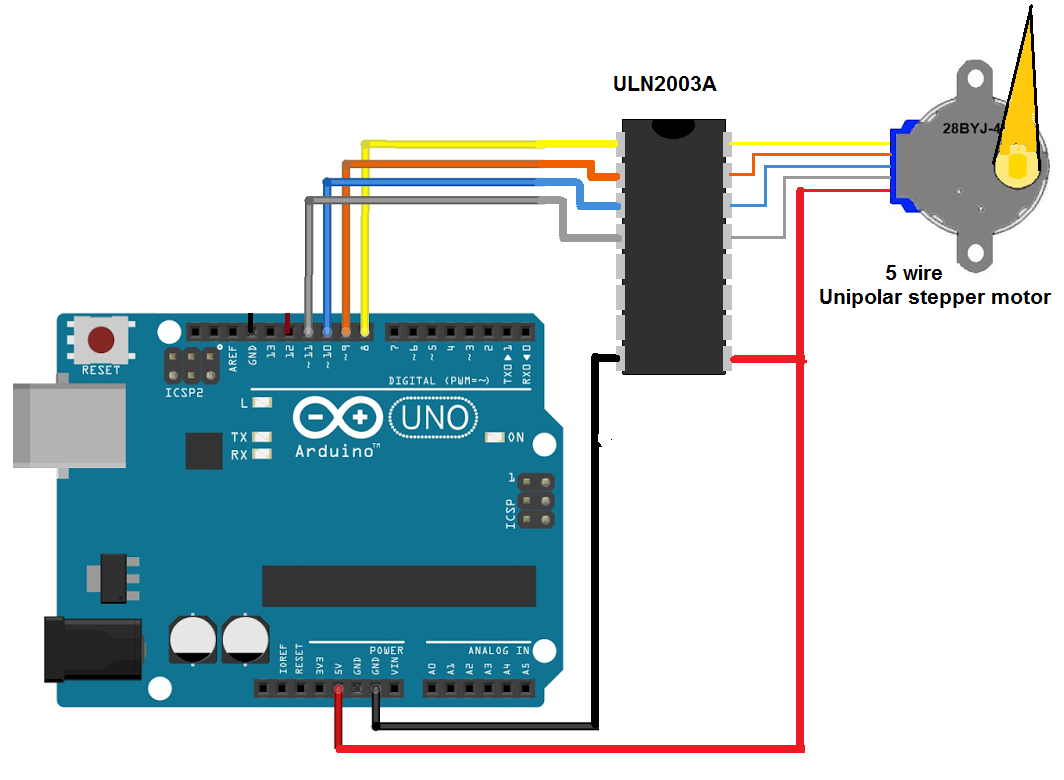
The brief descriptions of all library functions are given here. Some examples are given afterward that explains how the motor is controlled using this library. There are two videos given that shows the demonstration of these examples. At last, the circuit is suggested that uses UNL2003A chip – widely used to control unipolar stepper motors.
To use this library in your arduino sketch just copy the Uni_polar_Stepper folder into the root directory of arduino library folder like C:arduino-1.6.7libraries
Description of library functions
1) Uni_polar_Stepper(int pin1, int pin2, int pin3, int pin4) – this will create an instance of Uni_polar_Stepper in the arduino sketch with stepper motor driver pins. Means one has to specify arduino board pins that are used to drive the stepper motor.
2) set_step_per_rev(int steps) – this function will set a number of steps required by a stepper motor to complete 1 revolution. Means it will set the step angle (step resolution) of the motor. One has to enter step angle of the motor for accurate control.
3) set_RPM(int rpm) – this function will set the speed of the motor in RPM and motor will rotate at the same speed with up to 95% accuracy.
4) rotate_CW() – this function will start rotating motor clockwise. To rotate motor clockwise continuously one has to use this function in a continuous loop.
5) rotate_CCW() – this function will start rotating motor counter clockwise. To rotate motor counterclockwise continuously one has to use this function in continuous loop
6) rotate(int dir) – this function will rotate motor as per selected direction. If direction is given as 1 then motor will rotate clockwise and vice versa
7) rotate_one_rev(int dir) – this function will rotate motor exact 1 revolution in selected direction
8) rotate_n_rev(int dir,int num) – this function will rotate motor required number of revolutions in selected directions
9) rotate_x_deg(int deg) – this function will rotate motor to desire angle from 0 – 360o in either direction with 80 – 100% angle accuracy
EXAMPLES
1) Rotate motor continuously in any one direction at 60 RPM
2) Rotate motor one revolution clockwise and one revolution counter clockwise continuously/*this program will rotate 4-phase unipolar stepper motor
3) Rotate motor clockwise at 100 RPM and counter clockwise at 50 RPM continuously
*/
4) Rotate motor 4 revolutions clockwise at 20 RPM and 2 revolutions counter clockwise at 10 RPM continuously
5) Rotate motor 90o clockwise and 90o anticlockwise continuously at 30 RPM
Note:- If the stepper motor is of higher current and voltage ratings then instead of UNL2003A chip, set of 4 separate Darlington transistors like TIP122, TIP142 etc can be used to drive stepper motors.
The given library and example programs along with above circuit are tested with following stepper motors.
1) 4 phase unipolar motor with 12V, 120 RPM (MAX), 48 steps/ rev (7.5o step angle)
2) 4 phase unipolar motor with 5V,60 RPM (MAX), 200 steps/rev (1.8o step angle)
3) 4 phase unipolar motor with 5V, 50 RPM (MAX), 400 steps/rev (0.9o step angle)
Here is the snap of circuit arrangement.

Fig. 1: Prototype of Arduino based Unipolar Type Stepper Motor Controller
Just go through the videos given here for demonstration.
Circuit Diagrams
Project Video
Filed Under: Electronic Projects
Filed Under: Electronic Projects

Questions related to this article?
👉Ask and discuss on Electro-Tech-Online.com and EDAboard.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.