A quadcopter is a kind of multirotor helicopter that is lifted and propelled by four rotors. They generally use two pairs of identical fixed pitched propellers, two clockwise and two counter-clockwise. They differ from conventional helicopters which use rotors as they are able to vary the pitch of their blades dynamically as they move around the rotor hub.
Gareth in a project explains how to build your own quadcopter flight controller with minute details of its working. This complex project has several pros and cons but if you want to fly your own controller, then you can proceed reading to the Gareth’s website.
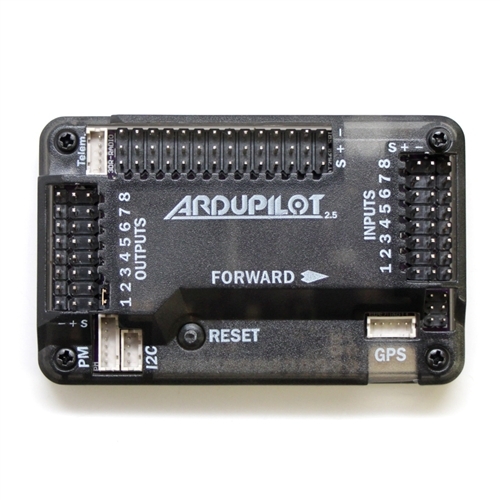
The project is based on assumption that you already have ArduPilot 2.5 control board where the copter is wired up and you have learned RC and you do know how to fly it. Actually the board is just an Arduino with some sensors connected that helps in programming in this article with our own software. This board is the one main source of all requirements needed to fly.
It is also assumed that you have a quadcopter in X configuration that will be used for different motor mixing which is switched between +/X and octa/hexacopters. From the Arduino libraries, the first and main library that’s used is the ArduPilot Hardware Abstraction Layer (HAL) library that has the software which can be ported to new hardware by only changing the hardware abstraction layer.
ArduPilot version of the Arduino IDE is downloaded and the libraries is grabbed for sketches folder. While reading the Radio Inputs, it is kept in mind that most radios are not precise so it is normally measured as the min/max pulse widths for each stick. The ArduPilot HAL library measures these pulse widths.
A new sketch is created to upload the code to the ardupilot hardware by using the serial monitor and then the minimum and maximum values for each channel is written. A function called map is used to take a number between one ranges and places it in another. The map function is pasted into the code.
Motors are controlled through the Electronic Speed Controllers (ESCs) and they work on pulse widths between approximately 1000us and 2000us. Next is to determine which orientation, or attitude the quad copter is in.
Further, Acrobatic/rate mode is where the sticks on the transmitter tell the quad to rotate at a particular rate and when sticks are returned to center the quad stops rotating. It’s a mode that requires practice to learn how to fly in but it is important to stabilize controllers operate on top of the rate controllers.
The projects include many technical aspects and the information provided here is just for reading purpose. If you want a video streaming and complete details of the controller, visit the website
Filed Under: Reviews

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.