This final year project by a student of university of liverpool is about controlling a rover in 3D space. He simulated the project in 3D space and depicted as the rover is moving on mars. This rover project can be taken further and many more functionalities can be added to rover. For example the on-board camera can take images and pass it to ground control room for further analyzing. Their is great potential in this rover project but first i have to explain how the stuff works?
LEGO MINDSTORMS Education EV3The robot used in the project is EV3. This robot is manufactured by LEGO. Like other lego stuff you can custom design the rover on a fix base. Many add on components for this board are available. You can take plenty of different tasks from this robot. The image of the rover is below.
|

LEGO® MINDSTORMS® Education EV3 rover
Lego robots intelligent brick
The main processing part on the EV3 rover is Lego intelligent brick. This brick is same like microcontroller or its better to say its more than a microcontroller. This Lego brick is heart and brain of the rover. It controls all the digital components (motors, sensors) on the EV3 rover. This brick contains arm A9 processor and works on Linux operating system. It has a display screen for configuration settings, control inputs and outputs.

Lego robots intelligent brick
|
This brick can be configured using a software tool. You can download the software tool and its driver from the Lego website. The link to EV3 rover and brick configuration is here. LEGO EV3 ROVER Getting started.
Note: Brick can be programmed to be controlled by a Bluetooth device. That is what the student did. |
Use of Eclipse software tool
From eclipse software the physical rover is controlled. Robot movements are transferred back to the eclipse program.
Use of Unity 3D software tool
A 3D model of a rover on mars is built in unity. Unity is a game designing plat form. This rover will simulate the movement of physical rover on ground.

Unity 3D Lego EV3 rover
Socket programming between Eclipse and Unity
To model and synchronize the hardware control and 3D rover the two software eclipse and unity must communicate with each other and latency should be minimum. Socket programming is a way to effectively and rapidly communicate between two different software programs. This socket communication is deployed in this case. Now the hardware movement by rover can be seen in 3D on personal computer screen.
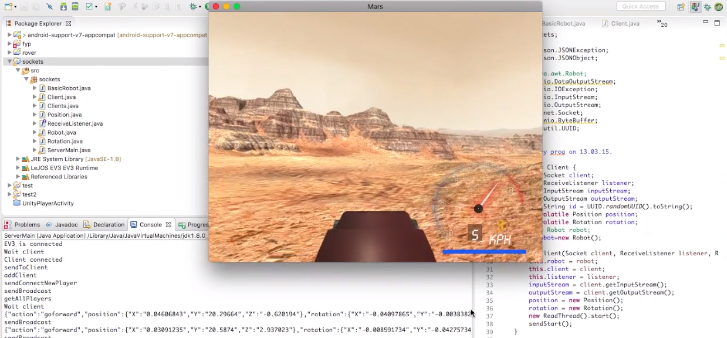
Unity and eclipse rover control
Author remarks about the project
This video includes the demonstration of my final year project- Drive a Lego EV3 robot on Mars. The object of the project is to control a simulation of a planetary rover on Mars by operating a physical Lego EV3 robot. In this video, you are able to see what software I use and how they can connect to each other and behave using socket.
Watch the project below
Filed Under: Knowledge Share, Microcontroller Projects

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.