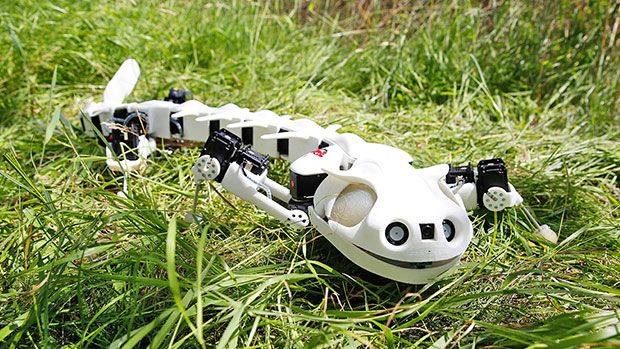
The Pleurobot from EPFL is one of the best robot salamanders. It is because it appears so much like an actual salamander, but more vitally, it moves similar to it. EPFL has out in years of hard work trying to confirm that the way Pleurobot travels is as approximate to the method that a true salamander moves.
The scientists at the EPFL describe how they have linked “high-speed cineradiography, dynamic scaling, optimization, high-end servomotors, three-dimensional printing and a customized dry-suit” to filter their robot to precisely gather the degrees of freedom, gait behaviours, and an array of motion of an actual animal.
There is so much emphasis on the humble salamander because they are pleasing, but there are numerous of much less vital considerations that prepare salamanders interesting to revision as well. They are comparatively primitive quadrupeds, making them easier to model and study, but they also characterise the type of a transitional animal between salamander that swim and quadrupeds that move, which evolutionarily talks is a stimulating place to be.
What is even more fascinating is that the multimodal character of the salamander is its potential to both walk on land and swim in the water – lied solely in its musculoskeletal structure and brain system. It you guillotine a salamander and then excite its spinal cord, what is left of it will begin to walk. Stimulate it more and it will move faster and is you maintain the pace, your headless zombie electro salamander will transmit into a swimming gait. Nervous systems are overrated.
The reason that this is vital, besides the noticeable application of raising a group of the dead, is that robots spend way too much of their brainpower just to protect from falling over. Shifting all of that to a cleverly created structure with reduced-level control could be beneficiary to moving robots, multimodal or others. And of course, a robot that so approximately replicates a biological system in neural control and biomechanics could be an exciting thing for salamander-ologists to play with.
The design of this new invention is based off what seems like a borderline insane volume of detailed study into the workings of actual salamanders. The size expands because of Pleurobot requiring DC motors, and effective DC motors have the smallest size, so the robot was reduced around them. Pleurobot utilizes 27 motors in total, with eleven spine segments, which is quite less than a real salamander. It is somewhat similar to an arbitrary optimization, the scientists say, which enable the Pleurobot to copy the bending of the spine of the salamander in distinct gaits to a great extent.
Presently, the researchers are more optimistic about the robot performing strenuous tasks but more exciting than this is the novel ways that the scientists can learn to design robots that can utilize behaviours on the basis of basic musculoskeletal and neuronal frameworks to take into consideration of all intricate stuff, leaving overrated robot brains to think on more vital things.
Filed Under: News

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.