
Figure 1. Drone motor
The electric motor, electronic speed controller, and flight controller are the three main components that constitute the propulsion system of any drone. It is now quite common to get a flight controller-ESC combo for building FPV drones, making the selection of electric motors often an independent subject. Though, it is really necessary to have a compatible combination of all three components — electric motors, flight controller, and ESC to get desired drone performance. A compatible combination of all three main components is automatically achieved when they are selected according to a specific drone size and weight criteria.
It is now common for makers and electronic hobbyists to try building FPV drones. With the advancements in battery technology and other drone electronics, it is far easier to build a drone now than it was ever before. First, a maker must decide on the size of the drone. The size of the drone can be estimated by calculating the expected weight of the drone. The weight of the drone is calculated by summing up the weight of all the components and accessories to be assembled as in a drone. Alternatively, the size of a drone could be decided and selected according to the other compatible components within an estimated weight constraint.
Either way, with a drone size selected, a maker can zero in on a drone frame. As drone frame and propeller size are related, appropriate propeller size can be calculated from the size of the drone. The diagonal length of the drone frame must be at least 3 times the size of the propellers. According to propeller size and weight, the lifting thrust and speed of the drone are calculated. These factors are most important in the selection of drone motors. Though there are several other specifications that must be considered and cared about when finalizing drone motors. In this article, we will take a look at all factors that must be considered before buying a set of drone motors. Let’s get started.
How do drone motors work?
Drones can be built using brushed or brushless motors. The brushed motors are generally used in toy drones and mini-drones only. All commercial drones use brushless motors. The brushless motors are also common in DIY drone projects; they are preferred due to minimal friction and energy loss in the motor. Whether it be a brushless motor or a brushed one, working of both types is based on same principle of electromagnetism. In both types, electromagnets and permanent magnets are used. When electromagnets are charged through current, a temporary magnetic field is formed, which interacts with the magnetic field of the permanent magnets. The repulsive and attractive forces between the permanent magnets and electromagnets causes the motor shaft to rotate.
Brushless vs. brushed motors
The very first thing to consider is selecting between brushed and brushless motors. The brushed motors are only suitable for small drones. These motors are not very energy efficient. Nowadays, for all types of drones brushless motors are preferred. The brushed motors are only used where drone performance can be compromised for cost cutting like in case of toy drones. Unless there is a tight budget constraint, you should be using brushless motors for your drone project.
Key factors in motor selection
Once you are done with the selection of motor type, you will next need to evaluate available buying options on a number of factors. Some of the most important factors to consider include:
- Drone weight & frame
- Thrust requirement
- Motor size
- Mounting pattern
- KV rating
- Current & voltage ratings
- Poles & magnets
- Motor torque
- KV vs. torque constant
- Bearing
- Motor winding
Drone weight & frame
First thing now is to calculate the drone weight. Consider all the components that will make or attach with the drone — the drone frame, flight controller, ESCs, motors, propellers, battery, camera, antenna etc. This way you can calculate the estimated weight of the drone. You should also take into account 10~20 percent extra weight (it would be better to overestimate than underestimate). With an estimated drone weight, you can determine the frame size. The frame size will give the maximum allowed propeller size. Ideally, the maximum propeller size is one third of the frame dimensions.
Determining thrust requirements
Now you have an estimated weight of the drone and selected a frame size. Next, you need to decide the thrust requirement of the drone. The maximum thrust by all the motors should be at least double the drone weight. If the drone weight is 1Kg, the motors all together must produce a thrust of at least 2Kg. If it is a quadcopter, that means each motor must at least produce a maximum thrust of 500 grams. This is almost essential. Otherwise, the drone won’t be able to lift itself in the air. Ideally, for a normal drone the thrust-to-weight ratio must be 3:1 or 4:1. This is the most ideal ratio for normal drones where the drone can be easily maneuvered as well as it has capacity to carry extra payloads.
The ideal thrust-to-weight ratio is different for different types of drones. For normal drones, the ratio must be 3:1 or 4:1. For freestyle drones, the desired ratio is 5:1. For racing drones, the ratio of 10:1 and 14:1 is preferred. The higher the thrust-to-weight ratio of the drone, the more difficult it could be for pilot to maneuver it. A drone with high thrust-to-weight ratio can jump over even on a slight throttle touch.
Motor size
As already mentioned, a drone motor, whether brushed or brushless, consists of electromagnets and permanent magnets. The electromagnets are present in the form of metal coils. These metal coils form the stator of the motor. The coil wire is enameled for insulation and avoiding short-circuiting. The coils are wrapped on poles with extremely thin insulation layer between them. The poles are made up of thin metal plates laminated together. When current flows through metal coils, temporary magnetic field is generated, which interacts with the magnetic field of the permanent magnets causing rotation.
The permanent magnets are attached to the inner side of the motor bell. The motor bell acts as a protective casing for the permanent magnets as well as metal coils. The motor shaft is connected to the motor bell. When change in magnetic fields causes rotation, the shaft transfers the torque from the motor to the propellers.
The size of a motor is determined by the width and height of the stator. This is indicated on the motor by four numbers — XXYY, where XX gives the width or diameter of the stator in mm and YY gives the height of the stator in mm. The greater the size of the motor, the higher the torque generated by it, and greater thrust is produced. With the increase in the motor size, however, its responsiveness is reduced. Plus, large motors are heavier than smaller motors. The motor size must be determined according to the maximum thrust requirement from each motor in a multi-copter. As you must have already determined the required thrust-to-weight ratio, you must have derived at maximum thrust required from each motor. Now, you will need to list motors meeting the desired thrust requirement and shortlist the smallest motors that fulfill the given thrust requirement.
Wider vs. taller motors
BLDC motors of many different sizes will match the desired thrust requirement. Some of these motors will have wider stators while some will have taller stators. Motors with a wide stator have greater inertia. It takes wider motors more energy to change rotational speed. As a result, these motors are less responsive. Wider motors, however, have more surface area allowing better cooling. The wider stator also allows larger bearings to fit in improving the durability, efficiency, and steadiness of the motor.
On the other hand, narrow motors are more responsive but may not have that much effective cooling. To decide between wider or taller motors, one must consider the use case of the drone. For drones that need to lift payloads, responsiveness can be a bit compromised in lieu of better cooling. So, wider motors must be preferred in this case. The drones carrying payloads need to be piloted carefully, so less responsiveness is in fact preferable in such drone designs. On the other hand, a racing drone must be as much responsive as possible. For a racing drone, a taller motor is suitable. Overall, how you intend to maneuver the drone i.e., slow or fast, and whether the drone needs to lift payloads or not will be the deciding factors for selecting wider or taller motors.
KV rating
Next, you need to look for the KV rating of the motor. The KV rating is the number of revolutions of the motor per minute when one volt is applied to the unloaded motor. If a drone motor has a KV rating of 920 and the motor is powered by a 3S LiPo battery i.e., a 12.6 V battery pack, it will revolve at 11,592 RPM without a propeller mounted on it. Motors with higher KV ratings have shorter windings and low internal resistance. As a result, these motors are prone to heating up early. The heating is obvious as most taller motors have higher KV ratings. The motors with a high KV rating rotate at greater speeds and produce more thrust.
It is a norm to combine motors of high KV rating with lighter propellers and motors of low KV rating with heavier propellers. If a motor of a high KV rating is combined with a heavy propeller, the motor will try to rotate the propeller at maximum speed. Due to the heavy propeller, more torque will be required, and the motor will draw more current. It is possible that too much current drawn by the motor may damage the ESC or MOSFETs in it. Similarly, if a motor of low KV rating is combined with a lighter propeller, it may not be able to produce sufficient thrust.
If you have already concluded to use wider motors considering good maneuverability at slow speeds, a motor of low KV rating in combination with heavier propellers should be selected. If your drone is meant to race across its flight without any need to carry a payload, select a taller motor with a high KV rating in combination with lighter propellers.
It should be noted that the KV rating is just a rough estimate for the motor RPM by motor manufacturers. The motor may rotate at lower RPM due to resistance by air; the KV rating is an estimated motor RPM for the motor not mounted with the propeller. Whether a low KV rating motor is combined with a heavier propeller or a high KV rating motor is combined with a lighter propeller, the combination must yield the desired thrust-to-weight ratio.
Motor torque
The torque generated by a motor depends upon the stator volume, types of permanent magnets used in the motor, quality of metal coils, construction of the motor (like number of poles and insulation gap), etc. Generally, the higher the stator volume of a motor, the heavier it is in weight. Provided there are two motors with same stator volume, the lighter motor must be preferred. The higher the torque of a motor, the more responsive it will be to pilot instructions. Too much torque or thrust, however, can give a jerky movement to the drone making it difficult for the pilot to control ite. Such jerky movements are accompanied by voltage or current surges through the motor, which may damage the ESC unit. For a given torque or thrust, always a lighter motor must be selected. The motors with less torque and lower RPM must be used where the drone needs to fly slowly and smoothly carrying a payload.
KV vs. torque constant
The torque constant of a drone motor is the amount of current drawn by the motor to produce certain torque. The torque constant and KV rating of a motor are not theoretically related. Still, it is observed that high KV rating motors have a high torque constant, and low KV rating motors have a low torque constant. This means that a high KV rating motor draws more current to produce the same amount of torque compared to a low KV rating motor. Due to high current consumption, the energy efficiency is affected. That is why high KV rating motors turn out to be less power efficient compared to low KV rating motors. To ensure power efficiency, it is important to choose an optimum KV rating such that the torque constant is not too high to impact efficiency. A motor with an over-the-top torque constant can damage the ESC and cause heating issues in the motor. With such a motor, the battery lifespan is reduced and there could be more wear and tear to the wires, motor, and MOSFETs.
Current voltage & efficiency
The voltage and current ratings are important in selection of a BLDC motor for drone. The higher the voltage of the motor, the more current it tends to draw from the battery. You must calculate the maximum current drawn by the motor when it operates at the highest voltage and generates maximum thrust. The current rating of the ESC must be higher than the maximum current drawn by the motor. The continuous current rating of the ESC may not need to be greater than the maximum current drawn by the motor. But to ensure a reliable and safe operation, the burst current rating must be greater than the maximum motor current. Even if the continuous current rating is on the higher side, that is best.
N & P in motor
The drone motors are marked with N & P ratings like 12N15P which indicates the number of electromagnets or poles in the motor stator and the number of permanent magnets. A motor that has less poles has higher torque output while a motor with more poles has smoother operation due to the uniform distribution of the magnetic field. As the drone motors are three-phase, the number of poles is always in multiple of 3. For 22XX and 23XX size BLDC motors, the 12N15P configuration is the most common. The number of poles and magnets does not directly impact the motor performance. It may, however, be required to know the number of poles and magnets in motors for setting certain configurations in flight controllers like enabling RPM filters.
Mounting pattern
The drone motors of sizes 22XX, 23XX, and 24XX have a mounting pattern of 16x16mm or 16x19mm. A drone frame must support both patterns. These motors are attached using M3 screws. The length of the screws must be 2mm longer than the thickness of the drone arm. For instance, if the drone arm is 5mm thick, M3 screws for mounting motors should be 7mm in length.
Motor winding
Like the number of poles in a motor impact the torque output and smoothness of the motor, the motor winding or turns around a pole also impact the motor performance. The motor winding is related to the current capacity and torque output of the motor. If the motor uses thick wire for winding, it is able to handle greater current through it. Due to the thick wire, the internal resistance of the wire is less likely to result in a high KV rating. Winding thick copper wire, however, reduces the electromagnetic field of the stator resulting in lower torque.
On the other side, if a thin wire is used for winding, its tolerance to high current draw is reduced. The winding produces a good electromagnetic field resulting in high torque, but due to high internal resistance of the thin wire, the KV rating is reduced.
Motor manufacturers deal with this torque vs. KV rating dilemma by increasing the number of windings while using thick copper wires. Thick wire ensures that the motor can withstand high current draw, and the increased number of windings improves the electromagnetic field of the stator, resulting in greater torque.
In fact, motor windings come in two options — single-stranded and multi-stranded. The single-stranded motor winding consists of thick copper wire with a smaller number of turns around the pole. Due to the large gap between thick wires, the number of turns is obviously limited. These motors can handle large current draw and can work with large voltage battery packs like 6S.
The multi-stranded motor winding has the same thick wire divided into three thinner strands. These motors produce strong electromagnetic fields and offer high torque output. Though the large current draw can damage the winding or make it break open. The KV rating for multi-stranded motor winding is obviously lower.
Motor bearing
The bearing of the motor has a direct impact on the durability and smoothness of the motor. The size of the bearing is determined by the difference between the inner diameter and outer diameter of the motor. The motors which have large bearings are more durable. The motors which have small bearings are more stable and smoother in operation. The size of the motor shaft is determined by the inner diameter of the bearing. Many motor manufacturers market their motors as having ceramic bearings instead of steel bearings. The ceramic bearing is smoother but may be prone to breakage.
Motor movements
The drone motors are rotated in opposite directions to stabilize the drone in the air. If all the motors rotated in the same direction, it would be very difficult for the drone to lift in the air and maintain proper orientation. That is why some motors are rotated clockwise while some motors are rotated counter-clockwise. The motors mounted diagonally opposite to each other are always rotated in opposite directions i.e., one motor rotates clockwise, and the other rotates counter-clockwise. Figure 2 demonstrates common motor rotation patterns for different multi-copters.
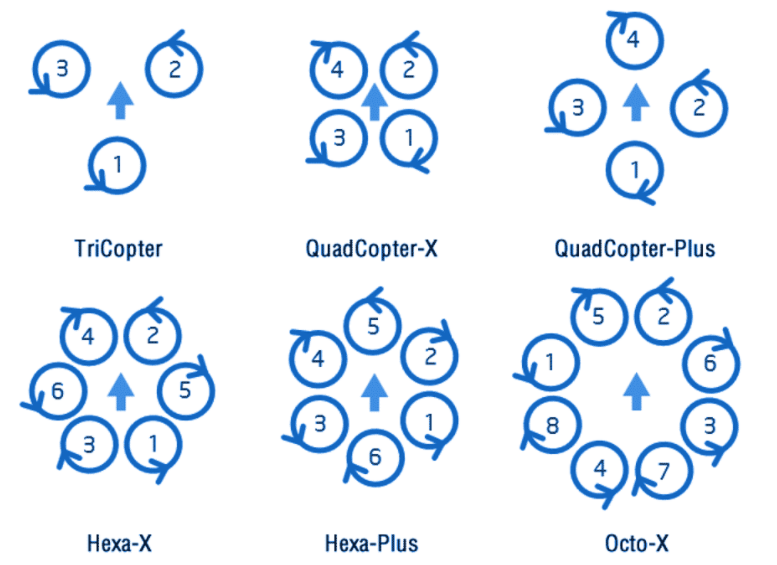
Figure 2. Drone motor rotation directions in different multi-copters.
Motor connections
The drone motors can be rotated clockwise or counter-clockwise. The brushed DC motors have only two wires. The brushless DC motors have three wires. These wires connect to the ESC. When connected in one manner, the motor rotates clockwise or counter-clockwise. To reverse the direction of rotation, any two connections with the ESC can be swapped. The direction of rotation of motors can also be changed by the flight controller.
Conclusion
There are several factors that must be taken care of while selecting a BLDC motor for a drone. First, you need to decide the drone’s weight and frame size. From there, you get the required thrust from the motor. According to the thrust requirement, you can select a motor size. Depending upon the desired nature of flight i.e., if the drone must fly slow and smoothly carrying a payload or must fly fast and responsive without payload, you can decide on the nature of the motor — wider or taller, KV rating, torque, and torque constant. The maximum current draw and voltage rating of the drone motor can then be used to determine a suitable ESC for the drone. Apart from these factors, other specifications like the number of poles, type of motor winding, bearing, and mounting pattern can be considered to further refine motor performance. The motors are connected in a drone to rotate in clockwise and counter-clockwise directions. The diagonally opposite pairs of motors rotate in opposite directions to keep the flight of the drone stable in the air. The direction and rotation of motors can also be changed by the flight controller. Table 1 summarizes the expected specifications of a drone motor according to desired drone performance.

Table 1.
Table 2 gives a rough estimate of suitable propeller size, motor size, and KV rating according to frame size.
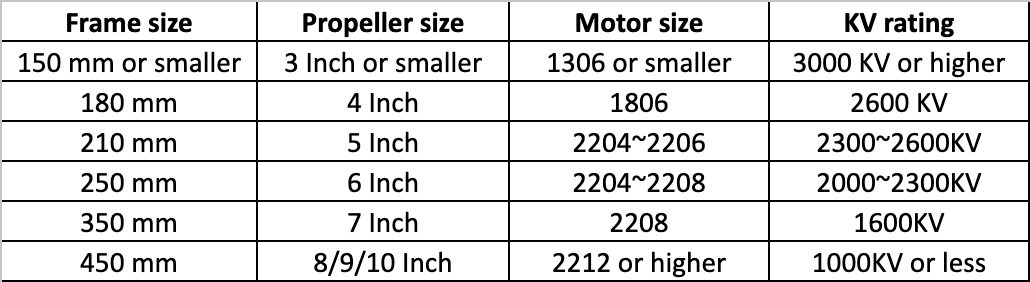
Table 2.
You may also like:


Filed Under: Tech Articles

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.