
An IR enabled Remote Controlled Car project has been initiated by Harrison Bourne. Its main idea is the building of a car that can be controlled by a TV remote and it can move backward and forward as well as turn both left and right and stop on command. After some unsuccessful attempts, he came up with something exciting, although more modifications are required.
Description
He started with analyzing IR receiver diode by attaching the signal out lead of the diode to an oscilloscope and then capturing the output. This was to figure out what could be the output of the IR receiver diode and how it will look like for some of the buttons on remote.
This results in usage of pulse distance code by the remote. It means that the length of time between the pulses determines if the pulse represent a one or a zero. Further, the first part of the code holds the device address and the last 6-8 pulses represent the command being sent. Among these, first one is irrelevant but based on this second information, the author started to write some Arduino code to read the commands but this attempt went unsuccessful

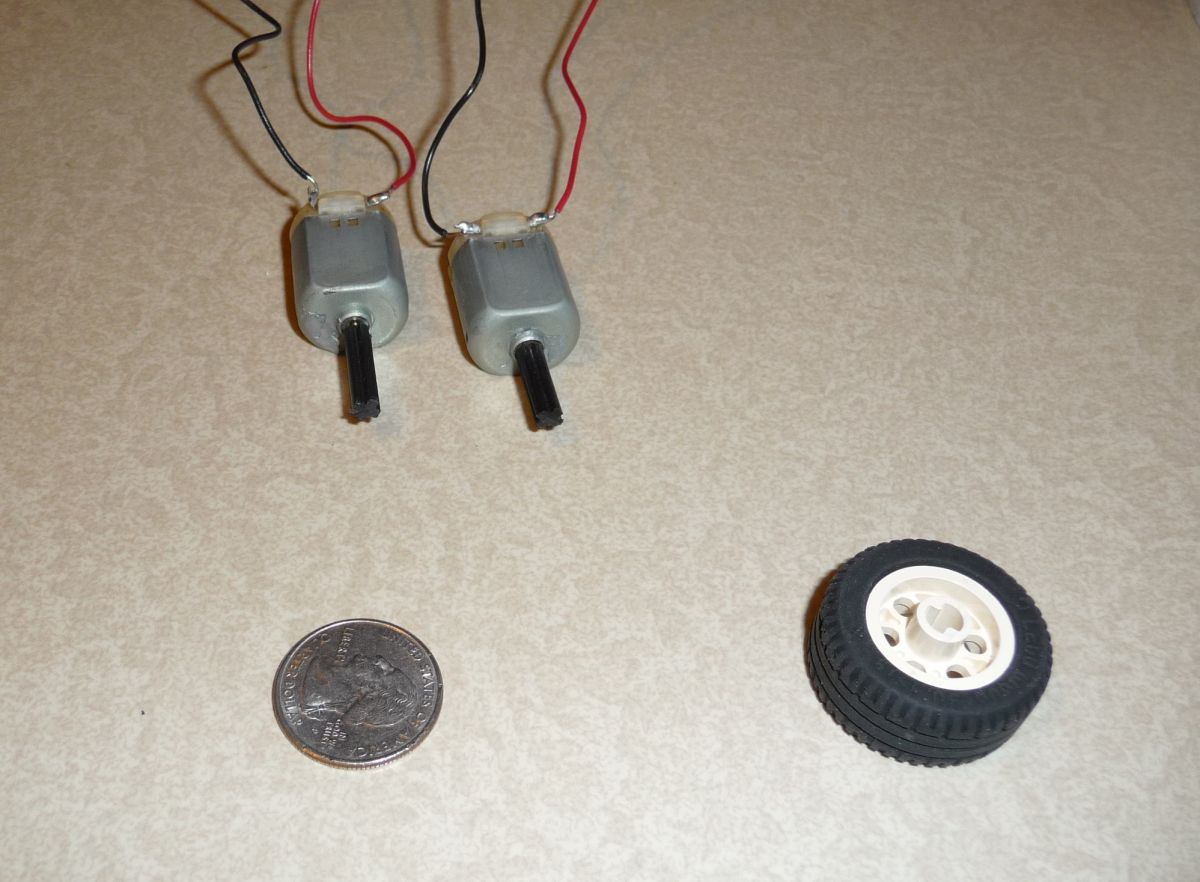
Then he used FAN8082 chips, some 3-6V DC motors and added some Lego shafts to the motor’s drive shafts to use Lego wheels. With the help of above items, he built the chassis for the car and attached the motors and wheels.
After some testing, he found out that the motors used a 6V power supply and do not have enough torque to move the car. He added bigger motors that run on 12v. Although this brings some complexity to the project but this was the best way of fixing the problem.
He modified the car’s chassis to fit the new motors because new motors were bigger in diameter and leg wheels could not be used
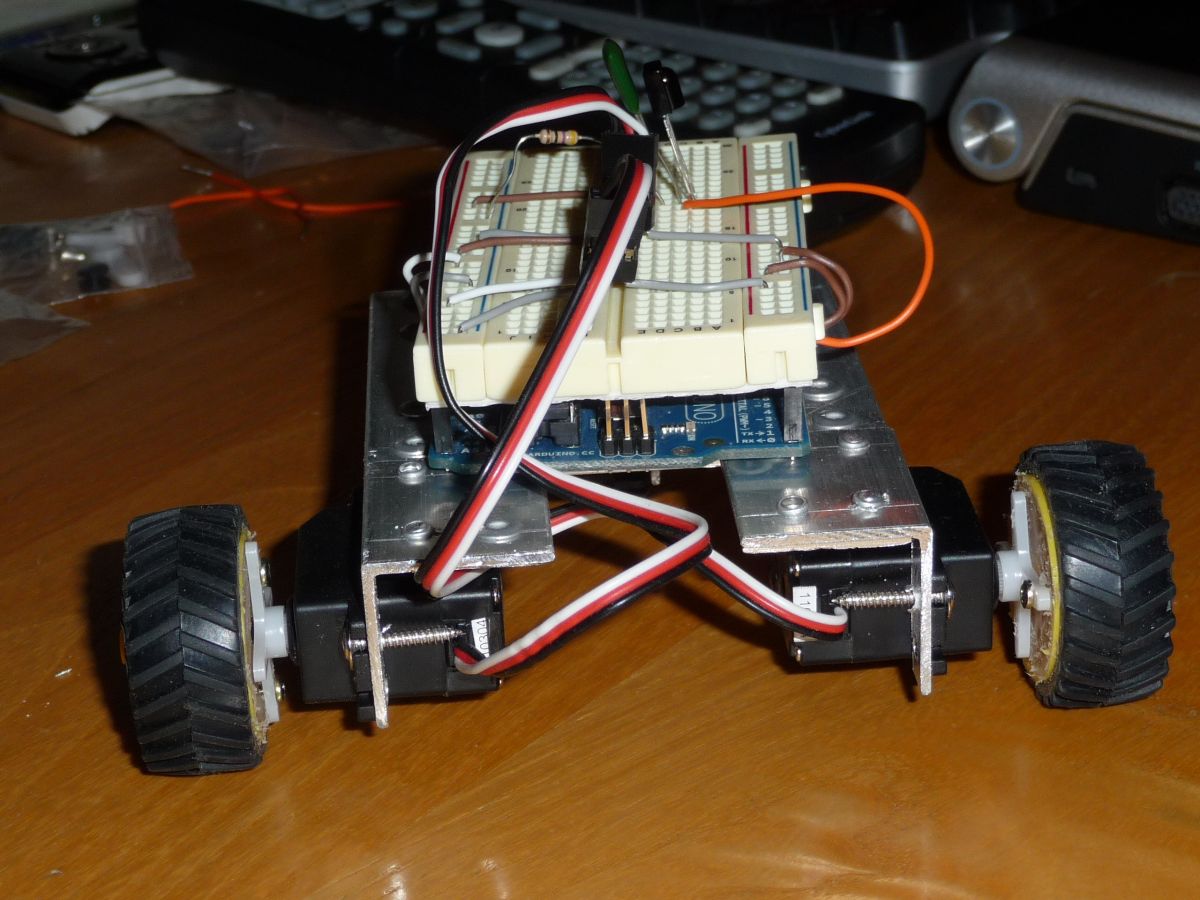
After building the IR receiver circuit, he put the whole thing together
After another unsuccessful attempt, he came to the conclusion that the FAN8082 chips cannot power 12V motors and had to find a higher power motor controller.
Even an H-bridge controller did not fulfilled the demand. According to the author, the motors have their own speed control which makes them only go in one direction. The motors mounted on the chassis means that they are going in opposite directions. This will make all the car to do is spin in circles. So he replaced motors with some servos and modified the chassis to fit the servos by filling the hub of the wheels with hot glue to create a surface to screw the servo attachment to.
After writing the code to interpret the IR codes, he used the Arduino command PulseIn. This was done to get the length of the high pulses to determine if the pulse represented a one or a zero. He also wrote the Arduino code to convert button presses into movements and wired up the Arduino.
Further improvements
As already mentioned, the general idea to build this project was to create a remote controlled car that is controlled by a TV remote. The project is completely dependent on power cables, it can be equipped with a battery in motors. Speed control can also be added depending on availability of time. Further Arduino can also be powered.

Challenges in this project.
Interpreting the IR signal is the first challenge faced when sent out by the remote. Since it requires an IR receiver diode to convert the signal from light pulses to electric ones and then the pulses has to be interpreted to discern which button on the remote has been pressed
Creating the vehicle’s chassis is another problem. The author planned to build a very simple rectangular frame out of aluminum angle
Only other major part of the project is to create the drive and steering system by using two DC motors to both drive and steer the car.
Filed Under: Reviews

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.