In the hunt of many scientists to find the most efficient robotic bug, as robotic bugs are considered nifty, most of the designs are enthused by the multi-modal, dynamic ways in which the insects capture the world. Inculcating skills, such as functioning with skills such as jumping can make tiny robots much for robust performers; enabling them to move farther on custody as well as assisting these overcome obstacles and uneven terrain.
Small jumping robots that were introduced before utilize a bouncy mechanism with a handle on it. With the handle, the spring stays binary and gets all twisted up, the handle controls it and then liberates on command, releasing the entire amount of energy in the spring to go. An enormous amount of power generates this way, but it is similar to everything or nothing at all type of thing, and hence, the distance, height or another magnitude is not controllable.
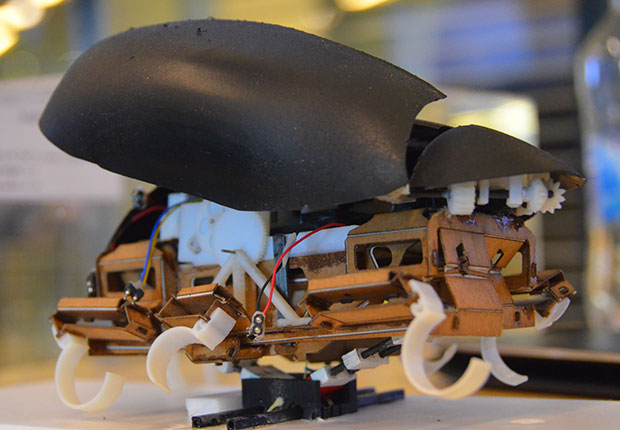
An innovative jumping technique for robots is introduced by the researchers of Seoul National University, South Korea. Such mechanism allows the robot to scale potentially from tiny hops to high levels up to aircraft catapult launch. As per the collaboration with UC Berkeley, the researchers have been fortunate to incorporate this unit into a hexapedal crawler that is same as the one used in DASH. As a result product, there is finally introduced a robot, JumpRoach that weighs just 60 grams and can run, jump and hop to a spectacular level of 1.6 meters worth of trips.
The robot possesses jumping potential to reach onto any of the heights that it intends, but still there are few alterations to be done as during one of the testing procedures the robot jumped and smashed itself into the table. The jumping technique incorporates a diamond-shaped four-bar linkage with connections like knees. The researchers have used eight latex bands for storing energy as they expand when the connexion is compressed that occurs because of functionality between a DC motor, wire, and pulley. There is a group of gears, in between the motor and the pulley, including a planetary gear that operates as a clutch when there is a reverse motion of the rotation cycle.
Such type of mechanism enables the robot to adjust its jumping height – as the motor meander the connection to accumulate as much amount of energy as preferred, and then alter itself to boost the jump. This module can manage approximately 3 meters vertically and when there is a good amount of energy stuffed inside the robot then it can jump between 1.6 meters and 1.1 meters. The DC motor that governs the jumping functionality also stimulates those shells that are used by the robot for précising.
Conclusion – At present, there are no wings designed under the shells, but significant benefits have been availed even with the primary wings pattern. Might be, the real powered flight is still not possible for this particular platform, but gliding can surely be met. Also, it can significantly increase the distance that the robot covers with each jump.
Filed Under: News

Questions related to this article?
👉Ask and discuss on Electro-Tech-Online.com and EDAboard.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.