[[wysiwyg_imageupload:1507:]]
This project is submitted by Mr. Debajyoti Mondal from West Bengal, India.
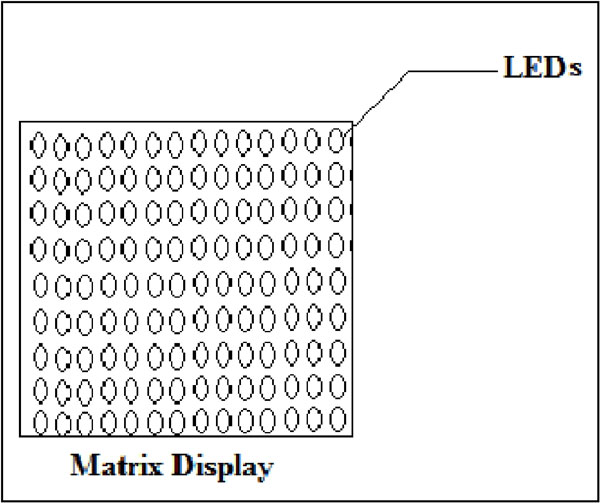
Moving LED Display is very active application of digital electronics. The application of this device can be found everywhere. From name plate display to train number display this display is used. The power consumption is 70% less than primitive display.
The main advantage of using this display is the information displaying on the display can easily be change by changing the program in microcontroller. And also animation is possible during displaying the massage. This is undoubtedly acceptable in the high society. There is another advantage of this device i.e. less cost-effective. The LED used in this device is RED LED having wavelength 660nm. Hence the displaying massage can be seen from very high distance.
The materials has been used in this device is very easily available in the market. So the raw material availability creates no problem during device manufacture.
Reason for Choosing this Project:
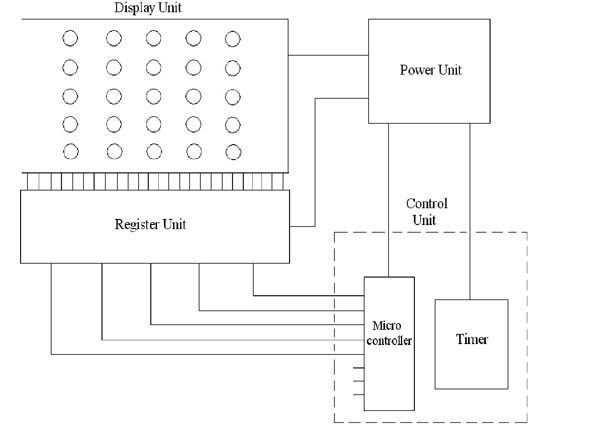
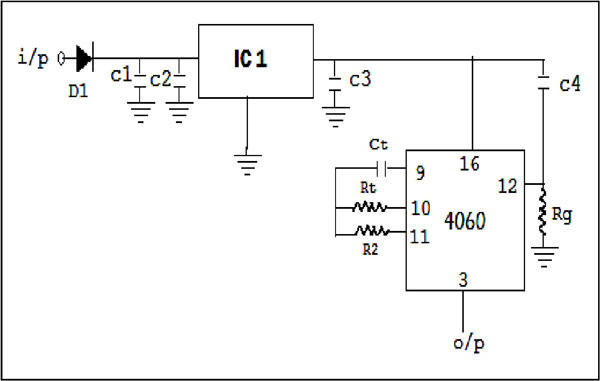
Power Supply Unit: – This Unit consists three sections:
1) Transformer Section, 2) Rectifier Section, and 3) Regulator Section.
 In Transformer Section a step-down transformer has been used to step-down voltage level from 240V to 12V (AC). The rating of the transformer is 12V,3A (36W).
In Transformer Section a step-down transformer has been used to step-down voltage level from 240V to 12V (AC). The rating of the transformer is 12V,3A (36W).  In Rectifier Section a bridge rectifier circuit has been used to convert 12V AC to 15V DC. Because all the components used in this circuit work at 5V DC. Diode 1N5408 has been used in this circuit to form bridge rectifier. Because this diode has the capability of handling high Current flow
In Rectifier Section a bridge rectifier circuit has been used to convert 12V AC to 15V DC. Because all the components used in this circuit work at 5V DC. Diode 1N5408 has been used in this circuit to form bridge rectifier. Because this diode has the capability of handling high Current flow
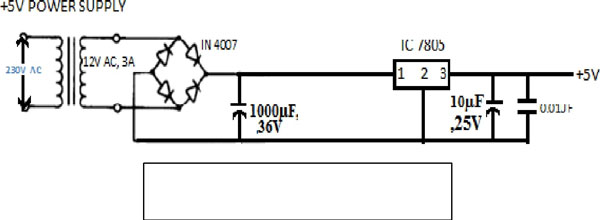 In Regulator Section IC7805 has been used to regulate the Voltage level at 5V DC. This component has very high stabile voltage level output.
In Regulator Section IC7805 has been used to regulate the Voltage level at 5V DC. This component has very high stabile voltage level output.
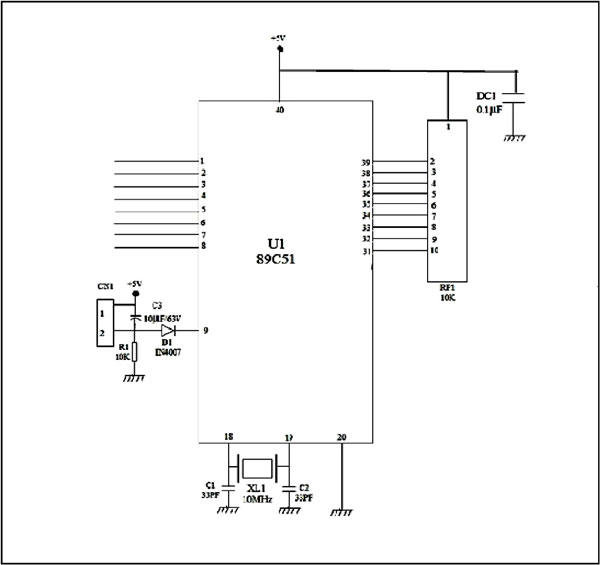
Register Unit:
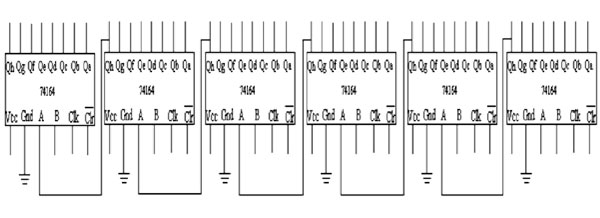
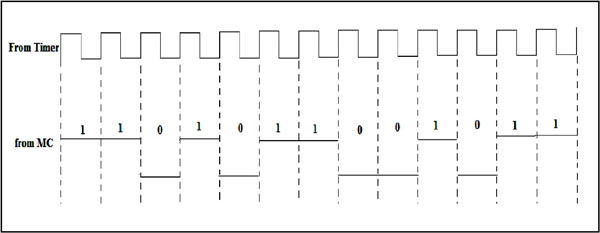
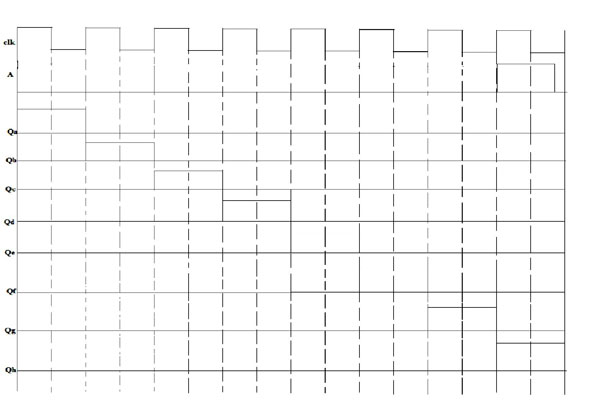 Register Unit works on the negative edge clock frequency. When a serial input from Microcontroller is given to register this input is shifted to the right after first clock pulse. Again for next serial input and clock pulse similar shifting is occurred.
Register Unit works on the negative edge clock frequency. When a serial input from Microcontroller is given to register this input is shifted to the right after first clock pulse. Again for next serial input and clock pulse similar shifting is occurred.Control Unit:
The execution time of this program is totally depends on the crystal oscillator frequency of the microcontroller. Microcontroller resets the whole circuit after switching on the power. This digital signal provided by the microcontroller is fed to the register unit as shown in circuit diagram tab2.
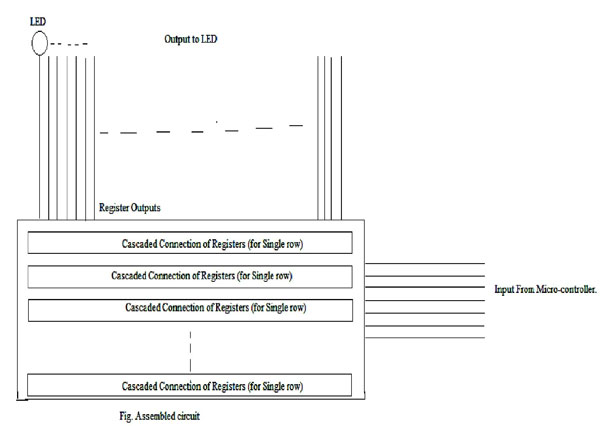
Assembled Circuit Analysis: Fig. Shows the Assembly
Project Source Code
Project Source Code
###
ORG 00H LCALL DELAY_P LOOP: LCALL STAR_TWO LCALL DELAY_ONE LCALL E_C_E LCALL DELAY_ONE LCALL STAR_TWO LCALL DELAY_Z LCALL STAR_TWO LCALL DELAY_ONE LCALL H_O_D LCALL DELAY_ONE LCALL STAR_TWO LCALL DELAY_Z LCALL STAR_ONE_V LCALL A_K_J LCALL STAR_ONE_V LCALL M_K_P LCALL STAR_ONE_V LCALL S_BOSE LCALL STAR_ONE_V LCALL S_SINHA LCALL STAR_ONE_V LCALL K_R LCALL STAR_ONE_V LCALL S_G LCALL STAR_ONE_V LCALL A_B LCALL STAR_ONE_V LCALL J_A_G_A LCALL STAR_ONE_V LCALL S_PAUL LCALL STAR_ONE_V LCALL R_K_M LCALL STAR_ONE_V LCALL T_S LCALL STAR_ONE_V LCALL A_BASU LCALL STAR_ONE_V LCALL B_BAG LCALL STAR_ONE_V LCALL S_MUKHARJEE LCALL STAR_ONE_V LCALL A_DAS LCALL STAR_ONE_V LCALL D_CHOWDHURY LCALL STAR_ONE_V LCALL B_P_DE LCALL STAR_ONE_V LCALL A_SARKHEL LCALL STAR_ONE_V LCALL A_ROY LCALL STAR_ONE_V LCALL AVI_DAS LCALL STAR_ONE_V LCALL LONG_PAUSE LJMP LOOP ;********************************************** ;********************************************** STAR_ONE: MOV P1,#24H LCALL DELAY_ONE MOV P1,#66H LCALL DELAY_ONE MOV P1,#18H LCALL DELAY_TWO MOV P1,#66H LCALL DELAY_ONE MOV P1,#24H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** DELAY_P: MOV R3,#251 X_P_ONE: MOV R5,#250 X_P_TWO: MOV R7,#04H X_P_THREE: DJNZ R7,X_P_THREE DJNZ R5,X_P_TWO DJNZ R3,X_P_ONE RET ;********************************************** ;********************************************** STAR_TWO: MOV R0,#02H P_ONE: LCALL STAR_ONE DJNZ R0,P_ONE RET ;********************************************** ;********************************************** STAR_ONE_V: MOV P1,#00H LCALL DELAY_ONE MOV P1,#24H LCALL DELAY_ONE MOV P1,#66H LCALL DELAY_ONE MOV P1,#18H LCALL DELAY_TWO MOV P1,#66H LCALL DELAY_ONE MOV P1,#24H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_TWO RET ;********************************************** ;********************************************** DELAY_ONE: MOV R2,#220 X_ONE: MOV R1,#230 X_TWO: MOV R5,#03H X_THREE: DJNZ R5,X_THREE DJNZ R1,X_TWO DJNZ R2,X_ONE RET ;********************************************** ;********************************************** DELAY_Z: MOV R3,#25 P_Z: LCALL DELAY_ONE DJNZ R3,P_Z RET ;********************************************** ;********************************************** DELAY_TWO: MOV R3,#02H P_TWO: LCALL DELAY_ONE DJNZ R3,P_TWO RET ;********************************************** ;********************************************** DELAY_THREE: MOV R6,#03H P_THREE: LCALL DELAY_ONE DJNZ R6,P_THREE RET ;********************************************** ;********************************************** LONG_PAUSE: MOV R7,#120H P_P: LCALL DELAY_ONE DJNZ R0,P_P RET ;********************************************** ;********************************************** DELAY_FOUR: MOV R7,#04H P_FOUR: LCALL DELAY_ONE DJNZ R7,P_FOUR RET ;********************************************** ;********************************************** E_C_E: LCALL E_CAP LCALL L_CAP LCALL E_CAP LCALL C_CAP LCALL T_CAP LCALL R_CAP LCALL O_CAP LCALL N_CAP LCALL I_CAP LCALL C_CAP LCALL S_CAP LCALL DELAY_ONE LCALL A_ONE LCALL N_CAP LCALL D_CAP LCALL DELAY_ONE LCALL C_CAP LCALL O_CAP LCALL M_CAP LCALL M_CAP LCALL U_CAP LCALL N_CAP LCALL I_CAP LCALL C_CAP LCALL A_ONE LCALL T_CAP LCALL I_CAP LCALL O_CAP LCALL N_CAP LCALL DELAY_ONE LCALL E_CAP LCALL N_CAP LCALL G_CAP LCALL G_CAP LCALL D_O_T RET ;********************************************** ;********************************************** H_O_D: LCALL D_CAP LCALL R_CAP LCALL D_O_T LCALL DELAY_ONE LCALL S_CAP LCALL U_CAP LCALL N_CAP LCALL A_ONE LCALL N_CAP LCALL D_CAP LCALL A_ONE LCALL N_CAP LCALL DELAY_ONE LCALL B_CAP LCALL H_CAP LCALL U_CAP LCALL N_CAP LCALL I_CAP LCALL A_ONE LCALL DELAY_ONE LCALL B_STRT LCALL H_CAP LCALL O_CAP LCALL D_CAP LCALL B_STP RET ;********************************************** ;********************************************** A_K_J: LCALL MR_DOT LCALL A_ONE LCALL S_CAP LCALL I_CAP LCALL M_CAP LCALL DELAY_ONE LCALL K_CAP LCALL R_CAP LCALL D_O_T LCALL DELAY_ONE LCALL J_CAP LCALL A_ONE LCALL N_CAP LCALL A_ONE RET ;********************************************** ;********************************************** M_K_P: LCALL PROF_DOT LCALL M_CAP LCALL A_ONE LCALL L_CAP LCALL A_ONE LCALL Y_CAP LCALL DELAY_ONE LCALL K_CAP LCALL R_CAP LCALL D_O_T LCALL DELAY_ONE LCALL P_CAP LCALL A_ONE LCALL N_CAP LCALL D_CAP LCALL I_CAP LCALL T_CAP RET ;********************************************** ;********************************************** S_BOSE: LCALL PROF_DOT LCALL S_CAP LCALL U_CAP LCALL B_CAP LCALL H_CAP LCALL A_ONE LCALL S_CAP LCALL I_CAP LCALL S_CAP LCALL DELAY_ONE LCALL B_CAP LCALL O_CAP LCALL S_CAP LCALL E_CAP RET ;********************************************** ;********************************************** S_SINHA: LCALL M_CAP LCALL R_CAP LCALL S_CAP LCALL D_O_T LCALL DELAY_ONE LCALL S_CAP LCALL O_CAP LCALL M_CAP LCALL D_CAP LCALL U_CAP LCALL T_CAP LCALL T_CAP LCALL A_ONE LCALL DELAY_ONE LCALL S_I_N_H_A RET ;********************************************** ;********************************************** K_R: LCALL MR_DOT LCALL K_CAP LCALL U_CAP LCALL S_CAP LCALL H_CAP LCALL A_ONE LCALL L_CAP LCALL DELAY_ONE LCALL R_O_Y RET ;********************************************** ;********************************************** S_G: LCALL MR_DOT LCALL S_CAP LCALL O_CAP LCALL U_CAP LCALL R_CAP LCALL A_ONE LCALL G_CAP LCALL N_CAP LCALL I_CAP LCALL DELAY_ONE LCALL G_CAP LCALL H_CAP LCALL O_CAP LCALL S_CAP LCALL H_CAP RET ;********************************************** ;********************************************** A_B: LCALL MR_DOT LCALL A_ONE LCALL M_CAP LCALL I_CAP LCALL T_CAP LCALL DELAY_ONE LCALL B_CAP LCALL H_CAP LCALL A_ONE LCALL T_CAP LCALL T_CAP LCALL A_ONE LCALL C_CAP LCALL H_CAP LCALL A_ONE LCALL R_CAP LCALL Y_CAP LCALL Y_CAP LCALL A_ONE RET ;********************************************** ;********************************************** J_A_G_A: LCALL MR_DOT LCALL J_CAP LCALL A_ONE LCALL G_CAP LCALL A_ONE LCALL N_CAP LCALL N_CAP LCALL A_ONE LCALL T_CAP LCALL H_CAP LCALL DELAY_ONE LCALL S_CAP LCALL A_ONE LCALL M_CAP LCALL A_ONE LCALL N_CAP LCALL T_CAP LCALL A_ONE RET ;********************************************** ;********************************************** S_PAUL: LCALL MR_DOT LCALL S_CAP LCALL U_CAP LCALL M_CAP LCALL A_ONE LCALL N_CAP LCALL DELAY_ONE LCALL P_CAP LCALL A_ONE LCALL U_CAP LCALL L_CAP RET ;********************************************** ;********************************************** R_K_M: LCALL MR_DOT LCALL R_CAP LCALL A_ONE LCALL J_CAP LCALL DELAY_ONE LCALL K_CAP LCALL R_CAP LCALL D_O_T LCALL DELAY_ONE LCALL M_CAP LCALL A_ONE LCALL I_CAP LCALL T_CAP LCALL Y_CAP RET ;********************************************** ;********************************************** T_S: LCALL MR_DOT LCALL T_CAP LCALL I_CAP LCALL R_CAP LCALL T_CAP LCALL H_CAP LCALL A_ONE LCALL D_CAP LCALL I_CAP LCALL P_CAP LCALL DELAY_ONE LCALL S_I_N_H_A RET ;********************************************** ;********************************************** A_BASU: LCALL MR_DOT LCALL A_ONE LCALL N_CAP LCALL I_CAP LCALL N_CAP LCALL D_CAP LCALL Y_CAP LCALL A_ONE LCALL DELAY_ONE LCALL B_CAP LCALL A_ONE LCALL S_CAP LCALL U_CAP RET ;********************************************** ;********************************************** B_BAG: LCALL MR_DOT LCALL B_CAP LCALL R_CAP LCALL A_ONE LCALL N_CAP LCALL I_CAP LCALL B_CAP LCALL R_CAP LCALL A_ONE LCALL T_CAP LCALL A_ONE LCALL DELAY_ONE LCALL B_CAP LCALL A_ONE LCALL G_CAP RET ;********************************************** ;********************************************** S_MUKHARJEE: LCALL MR_DOT LCALL S_CAP LCALL U_CAP LCALL R_CAP LCALL A_ONE LCALL J_CAP LCALL I_CAP LCALL T_CAP LCALL DELAY_ONE LCALL M_CAP LCALL U_CAP LCALL K_CAP LCALL H_CAP LCALL E_CAP LCALL R_CAP LCALL J_CAP LCALL E_CAP LCALL E_CAP RET ;********************************************** ;********************************************** A_DAS: LCALL MR_DOT LCALL A_ONE LCALL K_CAP LCALL I_CAP LCALL N_CAP LCALL C_CAP LCALL H_CAP LCALL A_ONE LCALL N_CAP LCALL DELAY_ONE LCALL D_A_S RET ;********************************************** ;********************************************** D_CHOWDHURY: LCALL MR_DOT LCALL D_CAP LCALL I_CAP LCALL B_CAP LCALL Y_CAP LCALL E_CAP LCALL N_CAP LCALL D_CAP LCALL U_CAP LCALL DELAY_ONE LCALL C_CAP LCALL H_CAP LCALL O_CAP LCALL W_CAP LCALL D_CAP LCALL H_CAP LCALL U_CAP LCALL R_CAP LCALL Y_CAP RET ;********************************************** ;********************************************** B_P_DE: LCALL MR_DOT LCALL B_CAP LCALL I_CAP LCALL S_CAP LCALL H_CAP LCALL N_CAP LCALL U_CAP LCALL DELAY_ONE LCALL P_CAP LCALL R_CAP LCALL A_ONE LCALL S_CAP LCALL A_ONE LCALL D_CAP LCALL DELAY_ONE LCALL D_CAP LCALL E_CAP RET ;********************************************** ;********************************************** A_SARKHEL: LCALL MR_DOT LCALL A_ONE LCALL B_CAP LCALL H_CAP LCALL I_CAP LCALL S_CAP LCALL H_CAP LCALL E_CAP LCALL K_CAP LCALL DELAY_ONE LCALL S_CAP LCALL A_ONE LCALL R_CAP LCALL K_CAP LCALL H_CAP LCALL E_CAP LCALL L_CAP RET ;********************************************** ;********************************************** A_ROY: LCALL MR_DOT LCALL A_ONE LCALL V_CAP LCALL I_CAP LCALL S_CAP LCALL A_ONE LCALL N_CAP LCALL K_CAP LCALL A_ONE LCALL R_CAP LCALL DELAY_ONE LCALL R_O_Y RET ;********************************************** ;********************************************** AVI_DAS: LCALL MR_DOT LCALL A_ONE LCALL V_CAP LCALL I_CAP LCALL S_CAP LCALL H_CAP LCALL E_CAP LCALL K_CAP LCALL DELAY_ONE LCALL D_A_S RET ;********************************************** ;********************************************** MR_DOT: LCALL M_CAP LCALL R_CAP LCALL D_O_T LCALL DELAY_ONE RET ;********************************************** ;********************************************** PROF_DOT: LCALL P_CAP LCALL R_CAP LCALL O_CAP LCALL F_CAP LCALL D_O_T LCALL DELAY_ONE RET ;********************************************** ;********************************************** R_O_Y: LCALL R_CAP LCALL O_CAP LCALL Y_CAP RET ;********************************************** ;********************************************** S_I_N_H_A: LCALL S_CAP LCALL I_CAP LCALL N_CAP LCALL H_CAP LCALL A_ONE RET ;********************************************** ;********************************************** D_A_S: LCALL D_CAP LCALL A_ONE LCALL S_CAP RET ;********************************************** ;********************************************** D_O_T: MOV P1,#0E0H LCALL DELAY_THREE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** B_STRT: MOV P1,#3CH LCALL DELAY_ONE MOV P1,#42H LCALL DELAY_ONE MOV P1,#81H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** B_STP: MOV P1,#81H LCALL DELAY_ONE MOV P1,#42H LCALL DELAY_ONE MOV P1,#3CH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** A_ONE: MOV P1,#0FCH LCALL DELAY_ONE MOV P1,#0FEH LCALL DELAY_ONE MOV P1,#33H LCALL DELAY_TWO MOV P1,#0FEH LCALL DELAY_ONE MOV P1,#0FCH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** B_CAP: MOV P1,#255 LCALL DELAY_TWO MOV P1,#0D9H LCALL DELAY_TWO MOV P1,#255 LCALL DELAY_ONE MOV P1,#6EH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** C_CAP: MOV P1,#7EH LCALL DELAY_ONE MOV P1,#0FFH LCALL DELAY_ONE MOV P1,#0C3H LCALL DELAY_TWO MOV P1,#0E7H LCALL DELAY_ONE MOV P1,#66H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** D_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#0C3H LCALL DELAY_TWO MOV P1,#0FFH LCALL DELAY_ONE MOV P1,#7EH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** E_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#0DBH LCALL DELAY_THREE MOV P1,#0C3H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** F_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#1BH LCALL DELAY_THREE MOV P1,#03H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** G_CAP: MOV P1,#7EH LCALL DELAY_ONE MOV P1,#0FFH LCALL DELAY_ONE MOV P1,#0C3H LCALL DELAY_ONE MOV P1,#0D3H LCALL DELAY_ONE MOV P1,#0F3H LCALL DELAY_ONE MOV P1,#72H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** H_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#18H LCALL DELAY_TWO MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** I_CAP: MOV P1,#0C3H LCALL DELAY_TWO MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#0C3H LCALL DELAY_TWO MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** J_CAP: MOV P1,#03H LCALL DELAY_ONE MOV P1,#73H LCALL DELAY_ONE MOV P1,#0F3H LCALL DELAY_ONE MOV P1,#0C3H LCALL DELAY_ONE MOV P1,#0FFH LCALL DELAY_ONE MOV P1,#7FH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** K_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#18H LCALL DELAY_ONE MOV P1,#3CH LCALL DELAY_ONE MOV P1,#0E7H LCALL DELAY_ONE MOV P1,#0C3H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** L_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#0C0H LCALL DELAY_FOUR MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** M_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#06H LCALL DELAY_ONE MOV P1,#0CH LCALL DELAY_ONE MOV P1,#06H LCALL DELAY_ONE MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** N_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#06H LCALL DELAY_ONE MOV P1,#1CH LCALL DELAY_ONE MOV P1,#70H LCALL DELAY_ONE MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** O_CAP: MOV P1,#7EH LCALL DELAY_ONE MOV P1,#0FFH LCALL DELAY_ONE MOV P1,#0C3H LCALL DELAY_TWO MOV P1,#0FFH LCALL DELAY_ONE MOV P1,#7EH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** P_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#1BH LCALL DELAY_THREE MOV P1,#0EH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** R_CAP: MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#1BH LCALL DELAY_TWO MOV P1,#0FFH LCALL DELAY_ONE MOV P1,#0EEH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** S_CAP: MOV P1,#66H LCALL DELAY_ONE MOV P1,#0CFH LCALL DELAY_ONE MOV P1,#0DBH LCALL DELAY_ONE MOV P1,#0F3H LCALL DELAY_ONE MOV P1,#0E3H LCALL DELAY_ONE MOV P1,#66H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** T_CAP: MOV P1,#03H LCALL DELAY_TWO MOV P1,#0FFH LCALL DELAY_TWO MOV P1,#03H LCALL DELAY_TWO MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** U_CAP: MOV P1,#7FH LCALL DELAY_ONE MOV P1,#0FFH LCALL DELAY_ONE MOV P1,#0C0H LCALL DELAY_TWO MOV P1,#0FFH LCALL DELAY_ONE MOV P1,#7FH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** V_CAP: MOV P1,#1FH LCALL DELAY_ONE MOV P1,#3FH LCALL DELAY_ONE MOV P1,#0C0H LCALL DELAY_TWO MOV P1,#3FH LCALL DELAY_ONE MOV P1,#1FH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** W_CAP: MOV P1,#3FH LCALL DELAY_ONE MOV P1,#7FH LCALL DELAY_ONE MOV P1,#0C0H LCALL DELAY_ONE MOV P1,#70H LCALL DELAY_ONE MOV P1,#0C0H LCALL DELAY_ONE MOV P1,#7FH LCALL DELAY_ONE MOV P1,#3FH LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET ;********************************************** ;********************************************** Y_CAP: MOV P1,#07H LCALL DELAY_ONE MOV P1,#0FH LCALL DELAY_ONE MOV P1,#0F0H LCALL DELAY_TWO MOV P1,#0FH LCALL DELAY_ONE MOV P1,#07H LCALL DELAY_ONE MOV P1,#00H LCALL DELAY_ONE RET###
Circuit Diagrams
Filed Under: Electronic Projects

Questions related to this article?
👉Ask and discuss on Electro-Tech-Online.com and EDAboard.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.