This article of David Bryan is for cat lovers especially for those who own a pet and also love travelling. The trouble of synchronizing both of them at same time seems hectic especially when it comes to feeding part. But if you are a tech savvy, then here is the solution. David Bryan has come out with a Wi-Fi enabled human/cat feeder powered from raspberry pi
 Requirements
Requirements
The list of specific parts and components that has to be acquired are easily available. Start with a drill and soldering Iron. Then you will need a wire cutter and pliers along with a hot glue gun. For software section, have a working and installed OS on the raspberry pi along with Wi-Fi adaptor setup. Adafruit occidentalis or raspbian work well with them. Download codes from Github Repo and play around with the GPIO in and out. And then install GPIO.PWM module. Other stuffs will be mentioned along with the post. But if you are building it, then read the post, collect all the parts first and then begin your project. For detailed information, one can visit David Bryan’s blog.
Working of the project
Start your project by testing the servo that whether they are powerful enough to move the flapper handle. The servos that rotate continuously are attached to the handle to rotate the flapper wheel with the help of gaffer tape. Handle is fixed at the back side which can be easily rotated in a 360 degree circle.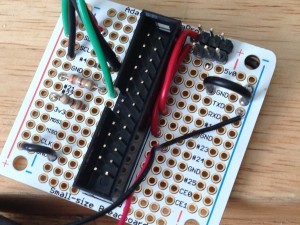
Next step is to cut out a channel for the servo head of about 2mm to make an outline for where the servo should sit. With the help of a hot glue, fix it. You can also use zip ties for better support. Now make a channel for the servo header and try to make the servo shaft to center as possible. It is time to wire up all things. David used a “small size Perma-proto raspberry Pi breadboard PCB kit” from Adafruit.
The back side is soldered with servo headers. It is made up of a 5V solder bridge and a ground solder bridge. Wire the GPIO outs from PINs 18 and 23 in the first hole and subsequently add 390ohm resistor for the LED lights. Make sure to add some heat shrink tube before resistor is soldered. Another 390ohm resistor as “pull down” resistor is connected to ground as a pushing button that does something when a human pushes it.

After soldering everything and testing all pushing buttons, stick it all together with the help of USB power cable, the servo headers, a through hole and the side buttons. Then jam it all in one pillar and this is how it looks like.
Future improvements
A pi camera can be installed along with mobile WebUI and PiUI . You can also add a powered speaker for your cat to call them in your absence. So you are done with the project now. All the best with your experiments.
Filed Under: Reviews

Questions related to this article?
👉Ask and discuss on Electro-Tech-Online.com and EDAboard.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.