A team of researchers recently came up with a strategy that can be used for automatic soft robots designs. The concept makes use of mathematical modelling for framing a specified movement trajectory such as a robot that can imitate human finger bending. The actuators used in formation of soft robots are powered by fluid and have reinforced fiber in them. This helps the actuators in replicating a wide array of movements. Though there is a large range of movements that is possible, designing of such actuators for movement output is a simple task.
The Harvard School of Engineering and Applied Sciences researcher Fionnuala Connolly says, “The design is so complicated because one actuator type is not enough to produce complex motions. You need a sequence of actuator segments, each performing a different motion and you want to actuate them using a single input.” Here, Connolly is referring to four main kinds of movements: bending, twisting, expansion, and extension. When a wide range of actuator segments get combined with each other a complicated movement can also be achieved. This is way more than what an alone segment is capable of performing.
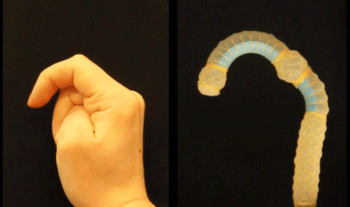
For this purpose, the research team created analytical models of four movement types. With the help of these, they formed a design tool that takes kinematics of desired motion as input and gives out the segment lengths and fiber angles for replication of motion. With the help of this model, the team was able to design two soft robots, one that can bend like index finger and the other one that twists like thumb. Both these entities get powered by a sole pressure source. Conor Walsh, another researcher from same team, explains, “This research streamlines the process of designing soft robots that can perform complex movements. It can be used to design a robot arm that moves along a certain path or a wearable robot that assists with motion of a limb.”
Filed Under: News

Questions related to this article?
👉Ask and discuss on Electro-Tech-Online.com and EDAboard.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.