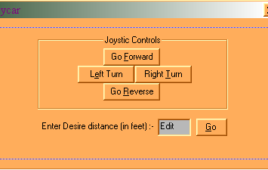
This is somewhat similar application that you have seen in “Remote controlled robo-vehicle”. The main difference is that now instead of remote now the computer will generate controlling signals through software written in VC++ which will be transmitted through RF transmitter attached to LPT port. Here again the term robo vehicle means a vehicle that can move in…
Cell Phone Controlled Robot without a Microcontroller

You may have come across many schematics and projects about a cell phone controlled land rover in many websites. But this is not the same.This article will show you how to make a cell phone controlled land rover without using a micro-controller. You read it right we are not going to use any kind of costly micro-controller for making the rover. Well you must have already come across the usual advantages of cell phone controlled Robot like, interference free communication, long range, etc. The motor driver L293d can control 2 motors bi-bidirectionally and has 4 inputs. The 4 outputs from the decoder IC is fed into the 4 inputs of the motor driver directly without using complicated circuits. Let’s see what’s more beneficial in this robot: Reduced circuit complexity, no need of any Programming, cost is highly reduced. Not everyone can afford a microcontroller along with its programmer and debugger boards.
Line Follower Robot

Line follower is an autonomous robot which follows either black line in white are or white line in black area. Robot must be able to detect particular line and keep following it. For special situations such as cross overs where robot can have more than one path which can be followed, predefined path must be followed by the robot. In the following section, we will discuss the line follower robot which follows black line in white area and take right turn whenever cross overs or Y shaped turn arrives.However with some minor suitable changes, users can make robot for other possibilities also.
DTMF Based ROBO Car

[[wysiwyg_imageupload:13665:]] 1. Mechanical 1.1 TABLE NAME OF COMPONENT QUANTITY 1. IRON CHESSY 1 PCS. 2.METAL GEARED MOTORS 2 PCS. 3.PLASTIC TYRES 2 PCS. 4. CASTER WHEEL 1PCS. 5.NUT & BOLT 3 PCS. 1.2 Structure…
Cellphone Operated Land Rover (Robot)
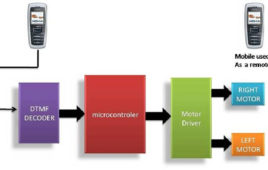
BLOCK DIAGRAM PROJECT OVERVIEW In this project “Cell Phone Operated Land Rover“, the robot is controlled by a mobile phone that makes a call to the mobile phone attached to the robot. In the course of a call, if any button is pressed, a tone corresponding to the button pressed is heard at the…
Obstacle avoidance & navigation of path tracing manipulator for Industrial Robots
CHAPTER 1 INTRODUCTION 1.1 GENERAL A robot is an automatically guided machine,…
89C51 Microcontroller based Pick n Place Robot
This is the same mechanical structure used in previous project but now it is interfaced with micro-controller 89C51. All the motions of robot will be controlled by 89C51. Full 360 degree rotation in horizontal plane and 90 degree movement in vertical plane is achieved. Once all the parameters are set operation is fully automatic. Means…