This project is by a final year student of university of liverpool. The project is prototype of a bistatic radar system. Prototype is made using arduino uno and ultrasonic transmitter and receiver. To rotate the ultrasonic transmitter and receiver servo motors are used. Ultrasonic receiver and transmitter are mounted on the top of the servo motors. A fixed object is placed at a distance to test the prototype. Clever bistatic distance calculation technique is translated in to arduino code and embedded in the arduino flash. The output of the bistatic arduino radar can be seen on the arduino serial monitor.
Bistatic ultrasound sensor working principleIn previous post we explained you the basic principle of bistatic ultrasound sensor. We put forward the proposal of a final year student from the same liverpool university. If you don’t know what bistatic or mono static radars systems are, I suggest you to look at the previous proposal/tutorial about bistatic and monostatic radar systems.
|
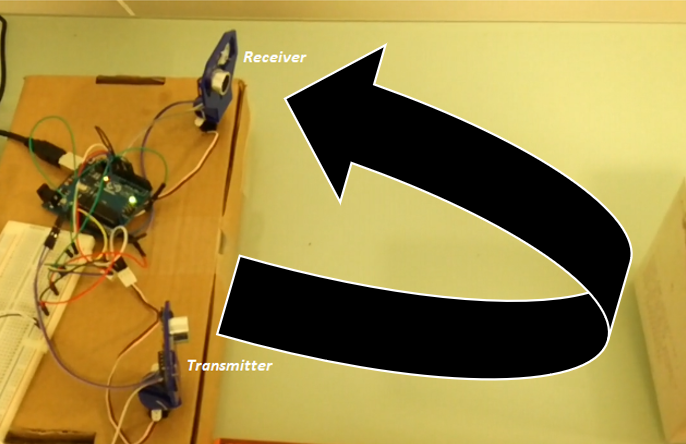
Arduino Bistatic radar-Prototype setup
A single arduino uno module is controlling all the hardware sensors and motors. Both the ultrasound transmitter and receiver are placed a part from each other. For testing a fixed object is placed in bistatic field of the ultrasound sensors. Prototype setup figure is given below.
Arduino uno bistatic radar prototype hardware
Ultrasound senors and servo motor setup
Big advantage of arduino platform is we can purchase variety of sensors and actuators combined together for a special purpose. In this particular project the advantage of pre-assembled sensors and actuators is fully utilized. The final product is below. You can easily purchase it under $5 from ebay or even more cheaper from aliexpress.
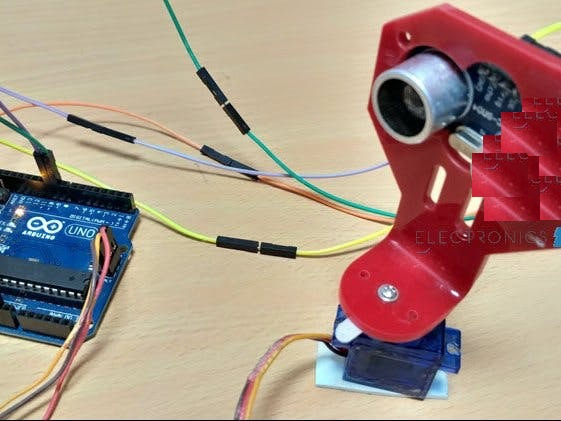
Ultrasound transmitter and receiver mounted on servo motor.
Bistatic arduino radar algorithm
The basic math’s behind the bistatic radar is shown in the below figure. Distance between transmitter and receiver is known. Angle of the receiver is also known. Using sound wave traveling speed, angle of receiver and distance between the transmitter and receiver the distance between object and receiver transmitter can easily be calculated. To easily grasp this whole model watch the project video.

Bistatic radar angle calculation and distance measurement mathematical equation
Arduino bistatic radar result
The results of the project are pretty good when the receiver and transmitter are aligned at 45 degree. But when the servo rotates and sensors are out of phase to each other the results are not correct. The reason is clear, project needs more math and software code need to be upgraded according to the mathematical calculations.

Arduino bistatic radar results on arduino serial monitor
Filed Under: Arduino, Microcontroller Projects

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.