When you think of robots, you might imagine those in science fiction movies such as Terminator, Star Trek, Star Wars, etc. However, industrial robots take many shapes and forms, including rovers, drones, surgical arms, humanoids, and even vehicles. There are several types of robots used in industries such as manufacturing, aerospace, automotive, search and rescue, medical, and others.
These mechanical machines have become capable of moving and performing fairly advanced tasks. But robotics is not confined to the solid state of matter only. In this article, we’ll discuss robots that are less common and far more unique. They can deform, stretch, and adapt to their environment. These shape-transforming robots are called soft robots.
What are soft robots?
Soft robots are different from conventional robots, typically made of metal and plastics, incorporating delicate and flexible materials instead. They frequently imitate the features of soft-bodied creatures from nature, mimicking the biomechanics of worms, octopuses, or human muscles. As a result, they can deform, stretch, and adapt to their environment in ways conventional robots cannot.
Soft robots can squeeze through tight spaces, fit into atypical surfaces, and interact more safely with humans. They’re widely used for medical purposes, underwater exploration, human-robot interaction, and search and rescue operations.
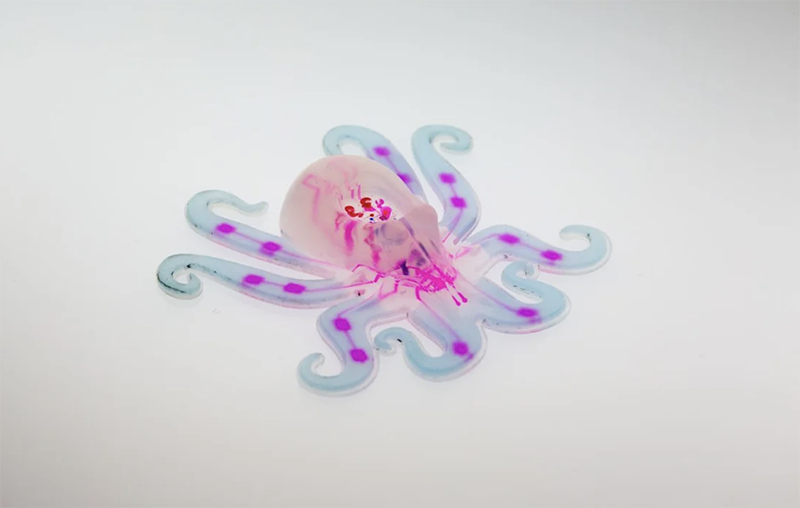
The first fully autonomous soft robot was “Octobot,” designed by researchers at Harvard University in 2016. It’s 3D printed, with an elastomer-based body that uses hydrogen peroxide as fuel. Interestingly, Octobot uses no electronics or hard components.
How do soft robotics differ from conventional ones?
Soft robotics introduces a paradigm shift in the field, transcending conventional boundaries of electronics, physics, and mechanical design. It marks the intersection of robotics and chemistry, offering a departure from the rigidity associated with typical robotic systems. And it stars with the material.
Soft robots use compliant materials like polymers and elastomers in their construction, rather than solids like metal and plastic. Their design prioritizes flexibility, deformability, and adaptability. This departure from rigid structures enables soft robots to deform, change shape, and adapt to various environments. The ability to change is a defining feature of soft robots, enabling them to navigate through complex or confined environments, or irregular spaces or surfaces, with greater ease than their rigid counterparts.
The malleability of these unique machines opens up new possibilities for applications in various fields, promising advancements in robotics that go beyond the confines of conventional design principles.
With their rigid structures, mechanical robots cannot truly emulate their bioinspired counterparts. Construction typically involves machining and welding to assemble complex mechanical components, relying on motors, gears, and links for maneuverability.
In contrast, soft robots closely mimic the soft-bodied organisms that inspire them, replicating more efficient and biomimetic functionalities. They’re designed using 3D printing, soft lithography, and textile integration techniques.
Soft robots often employ pneumatic or hydraulic systems, shape-memory alloys, and other compliant fluid and adaptive movement mechanisms. Unlike conventional robots using wheels, tracks, or legs for locomotion, soft robots move through crawling, peristaltic motion, undulating, or other nature-inspired methods in their surrounding environment.
Additionally, soft robots are inherently designed for human interaction and pose minimal risk of injury in case of accidental contact, ensuring safe coexistence with humans. There are rarely any safety concerns that occur with conventional robots operating near humans, leading to the integration of sensors for accident prevention.
This paradigm shift in design and materials heralds a new era of robotics with enhanced safety and biomimetic capabilities.
Conventional robots are suitable for manufacturing, assembly lines, and heavy-duty operations requiring precision, repeatability, and strength. Soft robots are ideal for applications that involve interactions with delicate objects, navigation through complex environments, and tasks where adaptability is crucial. Such applications are often encountered in medicine, collaborative robotics, and search and rescue operations.
Popular soft robots
The first soft robot was built in 2016. Since then, several soft robots have been designed and emerged as the field continues to advance. Here are a few of the popular soft robots that have recently gained attention.
Octobot: the first soft-bodied robot, developed at Harvard University in 2016, inspired by an octopus. It operates autonomously, using a combination of soft lithography, 3D printing, and embedded microfluidics.
mGrip: a versatile soft robotic gripper developed by Soft Robotics, available in various designs inspired by nature — including those inspired by the human hand or other animals. These grippers are appropriate for delicate and irregularly shaped objects because they use compliant materials that conform to the shape of the object. They’re used to grasp objects and diverse environments are used for robotic manipulation.
Wyss Institute’s Soft Robotic Exosuit: The Wyss Institute for Biologically Inspired Engineering at Harvard University has developed soft exosuits, wearable devices designed to assist and augment human movement. These robots are built using use textile-based materials that provide support and enhance the wearer’s natural biomechanics. They’re used in rehabilitation settings to aid individuals with mobility impairments or to enhance the performance of healthy individuals.
Soft robotic stingray: replicate the swimming gait of actual stingrays. They’re used for underwater exploration and are propelled by actuators that resemble muscles.
Soft robotic catheters: used in minimally invasive medical treatments. Compared to conventional rigid catheters, they’re more flexible and can pass through intricate anatomical structures with less chance of causing tissue injury. The STIFF-FLOP (STIFFness controllable Flexible and Learnable manipulator for surgical OPerations) surgical robot is one example.
RoboSoftWorm: inspired by the movement of worms, they robots are typically used for search and rescue operations in confined spaces. The RoboSoftWorm uses peristaltic motion to get around.
Soft Robotics Toolkit: an open-source resource developed by the Harvard Biodesign Lab that provides information, designs, and tools to help researchers and engineers create their soft robotic systems.
Biohybrid soft robots: Many research teams are developing biohybrid soft robots, which combine biological cells or tissues. To accomplish such tasks, these robots may make use of organic components or muscle cells.
Soft robotic prosthetics: prosthetic devices that are made of soft materials, improving the comfort and flexibility of users. Companies like Soft Robotics and others are working on creating adaptable and comfortable prosthetic solutions.
Soft robot for endoscopic surgery: developed for endoscopic surgery applications, allowing for more flexible and less invasive procedures.
Soft robotic grippers for agriculture: designed to enable robots to handle and harvest fruits without harming the crop. Systems for automated harvesting can benefit from this.
How are soft robots built?
The construction of a soft robot begins with the selection of materials, typically soft and flexible substances like elastomers, polymers, and silicone. These materials enable the robot to deform and flex, emulating the characteristics of soft-bodied organisms.
The next step involves designing the robot’s shape, structure, and functionality. This process must consider the intended application, method of movement, and the tasks the robot is expected to perform. Computer-aided design (CAD) software models the soft robot, and simulation tools analyze the behavior and performance.
Once the model is finalized, specialized fabrication techniques, such as soft lithography, 3D printing, or textile integration, are used. Soft lithography entails casting silicone elastomers into molds to create soft and flexible structures. Some soft robots incorporate fabrics or textile-like materials to enhance flexibility and introduce new features. Additive manufacturing techniques, such as 3D printing with flexible materials, facilitate the creation of complex and customized soft robot components.
Sensors, actuators, and other components are integrated into the soft robot during fabrication. Depending on design requirements, these robots employ pneumatic, hydraulic, or electric actuators. Many use pneumatic or hydraulic systems to actuate and regulate motions, featuring integrated inflatable tubes or chambers filled with liquid or air to achieve controlled deformations. This comprehensive process produces soft robots with tailored shapes and functionalities for various applications.
Control algorithms govern the movements and responses of the robot, managing various aspects like adjusting the pressure in pneumatic systems, coordinating actuator activation, and responding to sensory input. Rigorous testing in a controlled environment assesses the robot’s actual performance, with design and fabrication iterations based on testing results to enhance functionality, efficiency, and reliability.
Depending on the design, the robot’s power source might come from batteries, external sources, or energy harvesting methods.
Customization is a critical aspect of tailoring soft robots to their intended applications. Once a design is thoroughly tested and finalized, assembly ensures proper connections and seamless integration of sensors, actuators, and control systems. This meticulous process results in a fully optimized soft robot ready for its designated tasks.
Why is soft robotics a growing field?
Soft robots represent a recent breakthrough in the field of robotics, offering innovation that’s distinct from conventional approaches. This emerging technology aims to revolutionize robotics by prioritizing safety, flexibility, adaptability, and accessibility.
Soft robots are unrestrained from typical robots’ rigid form and function, enabling deployment in new and inaccessible areas. Soft robots mark a significant shift in design based on chemistry and biometrics, rather than electronics and mechanics. In some cases, soft robots function without electronics and aren’t limited to kinematics or specific energy sources. For example, the Octobot harvests its energy from chemical reactions. Additionally, thanks to their flexibility and adaptability, they hold promise for the development of wearable robotics.
Soft robotics excel in navigating complex and dynamic environments, pushing the boundaries of what was once deemed impossible.
Applications
Although a relatively recent development, soft robots are used in several applications because of their flexibility and adaptability. Here are some examples.
Medical robotics: useful in minimally invasive procedures, navigating through delicate tissues, and improving surgical precision. Soft robotic devices are suitable for exploring and performing tasks in the human body, such as endoscopic examinations and targeted drug delivery.
Human-robot collaboration: often ideal for collaborative activities in shared workspaces because these innovative robots can safely interact without minimal risks.
Prosthetics: these devices are made of soft materials that fit more comfortably than typical prosthetics, resembling the flexibility and range of motion of real limbs.
Wearables: soft robotic exoskeletons can assist with physical tasks, often increasing speed and endurance, and more.
Rehabilitation: advanced medical devices and soft exosuits can help people recovering from injuries or with limited movement. They allow for adaptive and natural mobility.
Soft grippers for manufacturing: these grippers are used for delicate product handling in industrial applications. They’re ideal for tasks that require a delicate touch and can mimic the contours of different objects.
Agricultural robotics: used to perform activities like selecting and handling fragile fruits without damaging them.
Bioinspired robotics: can mimic the motions and functions of soft-bodied creatures by taking their cues from nature. This comprises robotic devices designed to resemble worms, octopuses, and other animals.
Search and rescue: extremely useful for search and rescue missions in hazardous or challenging-to-reach situations. The dexterity of such soft robots enables them to maneuver around obstacles and confined areas.
Underwater exploration: Since soft robots are flexible and adaptable, they are employed for underwater research. They’re more adept at navigating underwater terrain than their rigid counterparts.
Space exploration: they can traverse small places and adapt to varied terrains, so soft robots have potential uses in space exploration.
Education and research: facilitate the exploration of novel materials, manufacturing methods, and control schemes by scientists and engineers acting as research platforms and instructional aids.
You may also like:



Filed Under: Tech Articles

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.