Industrial robots are the backbone of the manufacturing industry. It is impossible to imagine modern factories without robots. All that automation in manufacturing units of all scales is using industrial robots. Industrial robots perform repetitive, tough, or hazardous tasks for human workers. Even the jobs humans can do are done with higher productivity and efficiency when accomplished by robots. The robots enable programmable automation and can do all sorts of tasks that do not require general human intelligence. They are best at doing everything they are programmed to do.
Industrial robots exist in many different sizes and shapes. We have already discussed the basic structure of an industrial robot. The basic construction of all industrial robots remains the same. Despite that, different robots look so different and yet so similar. There are many different ways industrial robots are assembled. The fact is that every robot is unique as it is designed to perform a unique task in a unique working environment. Despite the different size, shape, look, and task, all industrial robot designs can be broadly categorized into the following classes.
- Cartesian robots
- Articulated robots
- Cylindrical robots
- Delta robots
- Polar robots
- SCARA robots
- Cobots
Let us learn about all these industrial robot types in more detail.
Cartesian robots
Cartesian robots are the simplest of all types of robots. These robots perform linear movements in space along Cartesian axes – X, Y, and Z-axis. The movements along three different axes are orthogonal to each other. The robot has a sort of cubical working area. These robots are commonly used as pick-and-place for material packaging, inspection, and loading. All CNC machines and 3D printers are essentially Cartesian robots.
These robots are most popular among all types due to their simplicity, high accuracy, high precision, low cost, and stroke length. Constructing and programming these robots is easier as all movements are linear along orthogonal axes. Due to linear movements, the stroke can be easily adjusted to any length and size. The linear movements can be actuated with extreme accuracy and precision. However, linear movements limit the flexibility of the robot. The robot can perform only specific movements, and it may be harder or impossible to do certain tasks. Due to linear movements in orthogonal dimensions, the robot usually requires more space to operate. For operations that require swift movement in specific spots, the Cartesian design may be too slow to get around.

Articulated robots
The movement and configuration of an articulated robot are similar to a human arm. The articulated robots have rotary joints actuated by servo motors. The joints serve as the robot’s axes. There can be anywhere from two to more than ten rotary joints, each providing additional freedom. These robots generally operate in four to six axes. The links rotate and twist to operate in the working environment.
These robots have great speed and flexibility. The robot can easily reach any spot in the working space swiftly. That is why these robots are used in various applications involving complex movements and detailed tasks. These robots are commonly used for welding, machine tending, coating, painting, material handling, and packaging. The only drawbacks of articulated design are its complexity and cost. Due to rotary movements, it is comparatively difficult to program these robots. The construction, too, requires more parts and careful assembling. Due to the use of servo motors and other mechanical parts enabling rotary motion, making these robots is expensive.

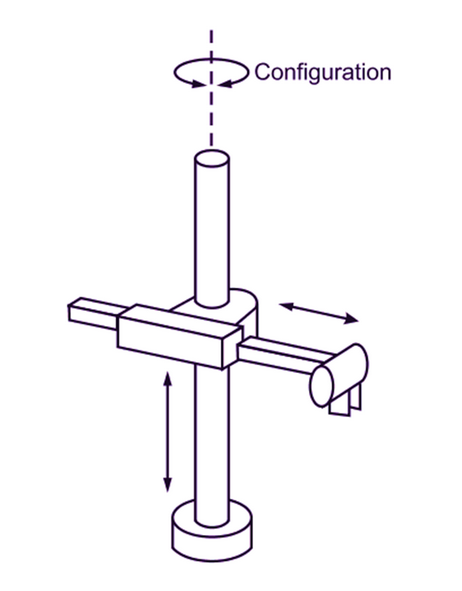
Cylindrical robots
Cylindrical robots are designed to operate in a cylindrical working space. The robot has a rotary joint at the base which can rotate 360 degrees. A linear arm is connected to the rotary shaft that can move up, down, and to and fro. So, there are three movement axes, one circular and two linear. These robots are actuated by powerful motors designed to lift and carry heavy weights. Cylindrical robots take up a lot of space on the floor, usually more than required for the working space. Unlike articulated or Cartesian robots, these robots do not offer any unique advantages except a high load-carrying capacity. That is why cylindrical robots are less common. These robots are still used for arc welding, painting, coating, and material handling in many places.
Delta robots
Delta robots are also called parallel robots. These robots have three arms connected to a common base mounted at the robot’s top. Each arm is parallelogram-shaped and placed at the vertex of an equilateral triangle on the base. The delta robots have a semi-spherical working space. The motors are placed at the base of the robot, which has most of the weight of the robot. The three parallelogram arms are light in weight and can be moved around the working space quickly. These robots are designed to work with small loads. Mainly these robots are used either for soldering or material packaging. Due to a triangular design with light arms, the robot can move and operate quickly within the working space enabling rapid packaging or quick soldering.

Polar robots
Polar robots are based on the polar coordinate system. The robot has two rotary joints and one linear joint. The rotary joints are used to move the robot arm about a sphere. The linear joint extends the arm to increase its working space. These robots are good at lifting heavy loads. However, these have complex designs and programming. Due to the rotary motion of two axes, making this robot is expensive. Plus, polar robots take in a lot of space on the floor, more than the required working space. With these cons, polar robots offer only a few advantages compared to Cartesian robots. That is why, in most of the applications, articulated robots have replaced polar robots. Articulated robots have similar complexity in design and high cost but provide more flexibility and require less space.

SCARA robots
SCARA stands for Selective Compliance Assembly Robot Arm or Selective Compliance Articulated Robot Arm. These are special articulated robots designed to have more flexibility around X and Y axes while having rigid transitions about Z-axis. These robots can be designed to handle light to moderately heavy loads. The design is optimized for high-position repeatability. Compared to other articulated robots, SCARA requires less space on the floor and can be easily mounted. SCARA robots are used for rapid pick-and-place tasks and material handling. These robots are generally seen as a speedy alternative to Cartesian robots.

Cobots
Cobots are also called collaborative robots. These robots are designed to operate and share their working space with human workers. These are employed in material handling, quality inspection, screwing, palletizing, sealing, machine tending, polishing, etc. These large and complex robots are designed to have flexible and adaptive mobility for working around a shared space. As these robots have a shared working space with humans, safety is the first thing considered most important in their design. Co-working with humans requires using many sensors on the robot and interpreting human behavior by the program. Often, making and commissioning these robots require several permits and safety assurance. Due to co-working, the design and operation have many constraints. Usually, the robot is explicitly made to operate at lower speeds to ensure human safety.

Conclusion
Cartesian, Articulated, SCARA, Polar, Delta, Cylindrical, and Collaborative are the broad categories of industrial robots. These are the most common robot types. There could be differences in the robot designs with several links and joints, type of joint, size, and shape of the robot. Despite those differences, most industrial robots certainly fall into one of these classes.
You may also like:



Filed Under: Tech Articles

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.