Electric vehicles (EVs) are reshaping the automotive industry in terms of sustainability and technology. Not only are EVs reducing greenhouse gases and dependency on fossil fuels, but these vehicles are also driving innovation in aerodynamics, lightweight materials, batteries, powertrains, inverters, software, advanced driver-assistance systems (ADAS), charging systems, cables, and much more.
There have also been advancements in efficiency, range, and vehicle costs, with more drivers than ever considering making the switch and leaving their conventional fuel-driven vehicles behind. Although much of this decision often comes down to battery life and driving range, one innovation that’s just as important is the vehicle’s ability to “communicate.”
In fact, much of an EV’s ability to function — from driving to charging — depends on its electronic communication protocols.

Figure 1. Electric car charging at a power station using the combined charging system or CCS, a standardized fast-charging protocol.
Multiple communication standards are used in EVs or for vehicle charging, including:
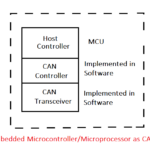
- Most EVs rely on the Controller Area Network (CAN) protocol for communication between vehicle components and external systems.
- The Modbus and Local Interconnect Network (LIN) protocols are used by some auxiliary vehicle components that do not require real-time data communication.
- Protocols like CHAdeMO and CCS have a crucial role in fast charging.
- ISO15118 enables bi-directional charging and vehicle-to-grid (V2G) integration.
- Ethernet is a one-stop solution for all high-bandwidth data communication like video streaming, infotainment systems, and ADAS in EVs.
- Wi-Fi and Bluetooth enable the integration of smartphones or devices in EVs
Let’s review these communication standards in more detail.
Controller Area Network (CAN)
CAN is the primary communication protocol used in most vehicles. Nearly all North American and European automotive manufacturers (70% globally) rely on CAN bus technology for engine management, safety systems, and comfort features. Almost all luxury and premium vehicles have fully integrated CAN systems, and only a few budget-friendly models still rely on LIN or multiplexing.
CAN is the communication backbone of all modern vehicles. It allows various electronic control units (ECUs) — such as the engine, airbag, and ABS control units — to “talk” to one another in real time, sharing essential information so the vehicle runs smoothly and safely. It’s also used in other industries, including aviation, aerospace, medical, and industrial automation, mainly because it’s cost-effective, reliable, and scalable.
A CAN bus uses only two wires and exchanges data in small, prioritized messages, ensuring critical information like brake or airbag signals are not delayed. CAN relies on carrier-sense multiple access with collision detection (CSMA/CD) that lets devices take turns transmitting, detecting, and resolving collisions to ensure message delivery. The protocol has built-in mechanisms that ensure data integrity and message reliability.
Like with conventional fuel-based vehicles, CAN in EVs facilitates communication between ECUs, including the control unit (EVCU), motor controller, battery management system (BMS), and other vital components. These systems continually exchange data, like the battery voltage, current, temperature, motor speed, and torque demands.
For example, CAN provides a vital link between the BMS and other systems in EVs. The BMS monitors battery health, temperature, and remaining charge, communicating this information to the EVCU and driver via the CAN bus. This bus also facilitates communication between the battery pack, cooling system, and EVCU, helping manage the battery temperature.
CAN further enables other safety features like regenerative braking, traction control, and electronic stability control to function effectively. The bus allows real-time communication between the brake system and motor controller to apply regenerative braking.
CAN is also essential for communication between EVs and charging stations, and is used by other protocols (like IEC 61851) for power delivery control, handshake, and safety checks during charging. New smart grid technologies like V2G also use the bus to communicate between the EV and the grid. With its help, EVs optimize energy use and intelligently regulate their charging and discharging in response to grid demand.
ISO 15118
ISO 15118 is an international standard that addresses the communication between EVs and charging infrastructure, enabling bi-directional power transfer and intelligent charging features. The aim is to improve safety, expedite the charging process, and encourage EV grid integration.
By establishing a standardized interface, ISO 15118 also enhances interoperability between manufacturers and charging stations. The standard incorporates two main components — the electric vehicle communication controller (EVCC) and the supply equipment communication controller (SECC). The EVCC is the controller within the vehicle that handles communication with the charging station. SECC is the controller within the charging station responsible for communication with the EV.
Using the standard, EVs can receive power from and send power back to the grid (V2G), supporting grid stability and energy management. ISO 15118 also helps adjust the charging based on grid conditions, user preferences, and energy tariffs, optimizing energy usage and costs. Additionally, the protocol supports automatic authentication and payment using digital certificates, eliminating the need for RFID cards or manual interactions. The protocol uses TLS and digital signatures to ensure data privacy and integrity, protecting against unauthorized access or tampering.
Currently, ISO 15118 is still evolving, with new features and enhancements being added, so its use has been limited in the production of EVs. However, this standard is expected to become the de facto for EV charging and grid integration. It will likely incorporate wireless charging and advanced energy management capabilities in the future.
CHAdeMO
CHAdeMO, “CHArging deMO,” is a Japanese-developed fast-charging standard for EVs. It supports alternating current (ac) and direct current (dc) charging, allowing rapid vehicle charging. Compared to the widespread ac charging in public stations or at home, it uses a unique direct current (dc) method that charges batteries exceptionally quickly.
While many stations already run at roughly 50 kW, CHAdeMO can deliver up to 500 kW of electricity. This means an EV’s battery can be charged to 80% full in as little as 30 minutes rather than the typical four to eight hours with ac charging. CHAdeMO is a fast-charging standard and contains V2G (vehicle-to-grid) capabilities.
CHAdeMO has been widely adopted in Japan, China, and South Korea. The standard faces competition from the well-established CCS standard in Europe and North America. It’s unlikely CHAdeMO will ever be adopted on a large scale in North America. In Europe, the standard is promoted by partnerships and pilot projects, but CCS still holds the upper hand.
Combined charging system (CCS)
The CCS is a standardized fast-charging protocol prevalent in North America and Europe. It uses a unique dual-port connector to accommodate ac and dc charging plugs. A CCS-equipped EV can access any compatible charging station, regardless of its power capabilities, supporting power levels ranging from 20 to over 350 kW, depending on the specific implementation. Higher power levels facilitate expedited charging durations and the establishment of ultra-fast charging infrastructures.
CCS relies on standardized communication protocols between an EV and the charging station. These protocols include:
- ISO 15118 – for V2G communication
- IEC 61851 – for charging station communication
- Open charge point protocol (OCPP) – for managing communication between charging stations and central management systems
- TCP/IP – for internet communication and data exchange between an EV and charging station during authentication, billing, and monitoring
- WebSocket – for full-duplex communication between EV and charging station
The current ac charging infrastructure can be used with the CCS standard because of its backward compatibility. This implies that Type 2 ac charging stations are still compatible with vehicles fitted with CCS. The backward compatibility eases the transition to CCS, allowing for a gradual integration of high-power dc fast-charging infrastructure.
Modbus
Although Modbus is an industrial communication protocol, its application extends to EVs. Where CAN bus is used for data communication among vehicle components, Modbus is used for communication between specific modules, such as auxiliary power units, cooling systems, or battery heaters.
Modbus offers a simple, cost-effective solution for integrating older components with newer systems. The protocol provides a straightforward way to access and analyze data for performance evaluation and troubleshooting. It’s become widely used by automobile engineers to connect testing equipment or diagnostic tools to specific components within EV prototypes. Many aftermarket modifications or add-ons for EVs (such as custom charging systems, battery monitoring gauges, or performance diagnostics tools) also use Modbus for communication with a vehicle’s existing systems.
One benefit to Modbus is that it offers reliable communication over long distances. Electric tractors, construction equipment, or heavy-duty trucks can rely on Modbus to communicate with external devices like diagnostic tools, charging management systems, or specialized attachments. Overall, the protocol has only a marginal role in EVs compared to the CAN bus. Modbus is limited to older components, specialized applications, R&D, and aftermarket modifications. The CAN bus remains the prevailing standard for most internal communication and functionality within an EV.
Local interconnect network (LIN)
LIN is a simple serial communication protocol for low-cost data exchange between low-power microcontrollers in vehicles. While CAN remains the primary communication standard for EVs, LIN plays a supporting role, catering to basic functions and legacy systems.
In conventional cars, LIN controls door locks, windows, mirrors, seats, and interior lighting and sends commands to the heating, ventilation, and air-conditioning systems. The instrument cluster uses LIN to communicate information related to the fuel level, speed, warning lights, and basic sensor data like coolant temperature or air pressure. In EVs, LIN has a limited role.
Older EV models used LIN to communicate between subsystems like seat controls, window mechanisms, and interior lighting. As this protocol is only suitable for low-speed applications, it’s used by non-critical EV systems, like auxiliary power units, battery heaters, or charging port communication. LIN is ideal for tasks that do not demand real-time communication. Some aftermarket add-ons or modifications to EVs, like custom lighting systems, battery monitoring gauges, or performance diagnostics tools, also depend on LIN.
Ethernet
Ethernet is a prominent technology in computer networking, increasingly finding its way into EVs. Ethernet provides significantly higher bandwidth than any automotive protocol, including CAN. It’s excellent at handling large amounts of data faster, making its high-speed and high-bandwidth capabilities ideal for EVs.
ADASs use Ethernet to analyze more data in real-time, leading to more accurate environment mapping and smoother vehicle operation. It facilitates data exchange between cameras, radar, and other sensors, enabling immediate responses for collision avoidance, lane departure warning, and adaptive cruise control. Ethernet caters to data exchange between the BMS, electric motors, and other components for real-time analysis of battery health and performance, which helps maximize efficiency and minimize charging times.
Ethernet also works in V2X communication (vehicle-to-everything). It enables car-to-car and car-to-infrastructure communication, allowing EVs to share information on traffic conditions, charging stations, and road hazards, optimizing traffic flow and reducing accidents. The standard is used as a physical layer protocol in V2G communication and bi-directional charging.
The Ethernet facilitates all over-the-air (OTA) updates for various EV systems. It’s also used for car-to-cloud communication for remote diagnostics, traffic updates, and emergency response. This allows real-time evaluation of EV performance and early detection of potential issues.
Like in conventional vehicles, Ethernet in EVs is used by infotainment systems for high-resolution video streaming, faster internet connectivity, and over-the-air updates. All high-speed data exchange between the BMS, electric motors, and other components in electric and hybrid vehicles is managed by the Ethernet.
Bluetooth & WIFI
Bluetooth and Wi-Fi are wireless protocols facilitating communication between EVs and external devices like smartphones. Bluetooth is used for keyless vehicle entry and start and remotely locking or unlocking the vehicle. Many OBD-II scanners connect via Bluetooth, allowing access to basic engine and battery health information through phone or tablet.
Bluetooth also connects one’s smartphone to the vehicle for safe and convenient hands-free calling while driving. It allows streaming music, podcasts, and audiobooks from the phone to the vehicle’s audio system.
Wi-Fi is typically used to download and install the software (OTA) updates for the EV, ensuring access to the latest features and bug fixes without visiting a dealership. Thanks to the vehicle’s Wi-Fi, passengers can surf the web, stream films, and stay connected while driving. Future EVs can also potentially exchange with other vehicles and infrastructure for improved traffic flow, safety features, and grid integration.
Conclusion
The successful integration of EVs into the automotive landscape relies heavily on efficient and standardized communication protocols. From the Controller Area Network (CAN) to the innovative bidirectional communication of ISO 15118 and the high-power charging capabilities of CHAdeMO and CCS, these protocols collectively contribute to EVs’ seamless operation and evolution.
As the technology continues to advance, the role of communication protocols in electric vehicles will undoubtedly expand, further enhancing performance, interoperability, and the overall driving experience.
You may also like:



Filed Under: EV Engineering, Tech Articles

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.