An electronic speed controller (ESC) is a vital component of a First Person View (FPV) drone. A drone’s propulsion system is built from three main components:
- The flight controller
- The electronic speed controller (ESC)
- The drone motors
The flight controller receives signals from the radio transmitter and sends signals to the ESC. Accordingly, the ESC controls the motor’s speed of rotation, maneuvering the drone in the sky. As each motor in a drone rotates at a slightly different speed, each requires one ESC — which operates similarly to a vehicle’s gearbox. It controls the speed of rotation based on timed signals.
A drone uses either brushed or brushless DC motors. Brushed DC motors are cheaper and often used in toy or mini drones. Consumer and commercial drones use brushless motors, which are more costly but also more effective. ESCs of different types are used with both motors.
 The newest generation of electronic speed controllers is advanced and offers several features. It’s recommended to buy a combination of flight controllers and ESCs to avoid compatibility between vendors. The FC-ESC combo is one choice, and the compatible ESC and flight controller can be bought separately. All of the components of a drone’s propulsion system are tightly coupled. This is why, it’s important to review the specifications of EFCs before buying one.
The newest generation of electronic speed controllers is advanced and offers several features. It’s recommended to buy a combination of flight controllers and ESCs to avoid compatibility between vendors. The FC-ESC combo is one choice, and the compatible ESC and flight controller can be bought separately. All of the components of a drone’s propulsion system are tightly coupled. This is why, it’s important to review the specifications of EFCs before buying one.
In this article, we will discuss the key factors to consider when choosing an electronic speed controller for your do-it-yourself FPV drone.
What exactly is an electronic speed controller?
An electronic speed controller controls the speed of a drone’s motors based on the flight controller’s throttle signals. An ESC connects the motors with the flight controller and the battery. The flight controller cannot directly control the drone’s motors, so the ESC operates as interfacing hardware between the two. It’s also responsible for converting DC power from the LiPo battery to three-phase AC power for the drone motors.
The ESC interfaces with the motor via three wires. The wiring determines the direction of the rotation of the motor. The amount of current supplied to the motor and the speed of rotation depend on the flight controller’s throttle signal.
The ESC’s circuit consists of a microcontroller, MOSFETs, gate drivers, a low dropout regulator, and filtering capacitors. It can also have a current sensor and LEDs on the circuit board. It might have a battery elimination circuit (BEC), but not always.
The types of ESCs
As mentioned, drones are built using brushed or brushless motors. However, the electronic speed controllers for these motors are different. The ESCs for brushed motors are commonly used in RC vehicles. The ESCs for brushless motors are lightweight, providing high performance and control. All commercial drones use brushless motors.
ESCs are also available in two configurations:
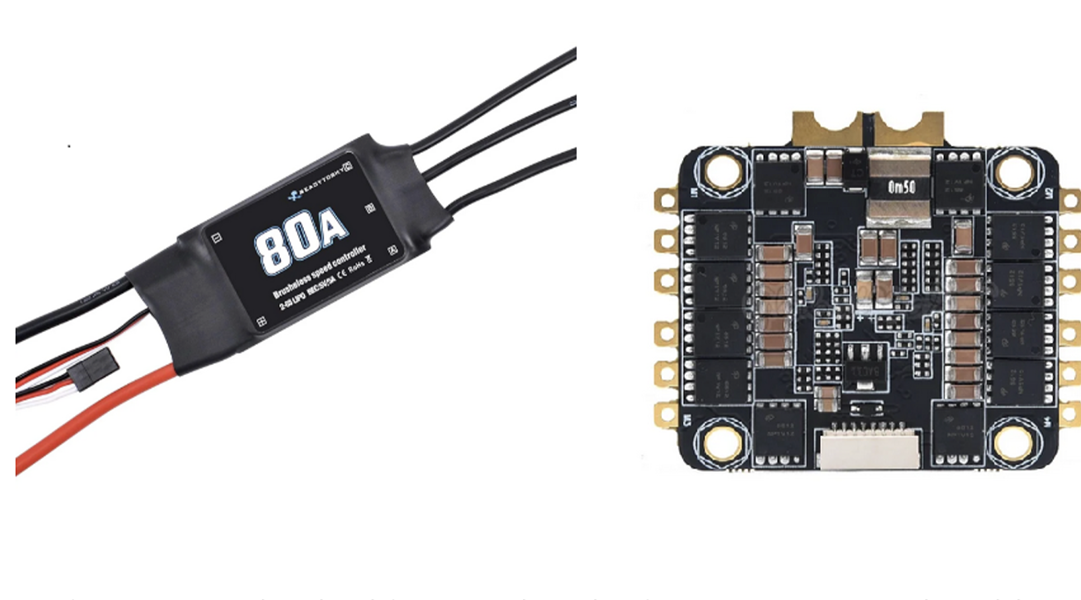
- Single ESCs – standalone modules that control a single drone motor
- 4-in-1 ESCs – comprise four single ESCs integrated into a single board
Single ESCs are low-cost ESC circuit boards that can be mounted to the arms of a drone, offering better airflow and natural cooling. They’re easy to install and replace if damaged.
The LiPo battery powers the ESC via a power-distribution board (PDB) or All-in-One (AiO) flight controller, which has an inbuilt PDB. Every ESC connects with the flight controller through a different wire harness, and this wiring (with soldering) adds weight to the drone. This wiring across the drone frame is the main drawback of single ESCs.
Additionally, when installing single ESCs, the center mass of the drone must be adjusted properly.
The 4-in-1 ESCs are designed for use in quadcopters. These modules come in the same size as the flight controller and are based on the mounting pattern of standard drone frames. For example, 4-in-1 ESCs sizes include 16x16mm, 20x20mm, 30x30mm, etc.
A 4-in-1 ESC is mounted just beneath the flight controller, connecting via a single harness. The use of a 4-in-1 ESC is convenient and minimizes soldering and wiring. Also, because it’s mounted at the center of the drone, just beneath the flight controller, it’s not necessary to adjust for the drone’s center of mass.
However, these ESCs lack modularity. The entire board must be replaced if a single ESC is damaged in a 4-in-1 ESC although they’re generally reliable. The larger ESCs are the most durable as they have larger MOSFETs onboard.
If you’re building a quadcopter, a 4-in-1 ESC is the most convenient option. Single ESCs are more affordable and provide modularity and low risk. If you’re building a different drone like a tri-rotor drone, hexacopter, octocopter, or other design, single ESCs are the only option.
Why use ESCs?
A flight controller cannot directly control drone motors, regardless of whether they’re brushed or brushless. One reason is that the flight controller is a microcontroller board that operates at low voltage and current, while the drone’s motors operate at a high current. Secondly, the drone’s motors are inherently unstable. The speed of the motors simply cannot be controlled without a dedicated circuit like an ESC.
The aerodynamics of a multi-copter is more complex compared to a helicopter. In a helicopter, only one rotor generates thrust for the flight, and there’s a tail rotor to counter the torque generated by the main rotor. In a multi-copter, each motor generates its own thrust, which must be controlled to ensure a stable flight.
The flight controller has an inbuilt gyroscope sensor that keeps track of the orientation and direction of the drone. The flight controller generates timed signals for all rotors according to feedback from gyro sensor. This ensures the multi-copter maintains a stable orientation when flying.
How an ESC works in FPV drones
An ESC for brushed and brushless motors is based on the same principle. The ESC draws power from the LiPo battery and receives a control signal from the flight controller. The control signal is a pulse-width modulated (PWM) wave. The amount of current supplied to the motor is proportional to the width of the PWM signal.
So, the motor rotates at a higher speed when the flight controller sends a control signal of greater width to the ESC, and vice-versa. The control signal from the flight controller is determined based on feedback from the orientation and direction sensors of the flight controller and the pilot input from the remote transmitter.
The variable speed of the rotors is controlled so the drone flies in the instructed direction and altitude while maintaining its orientation and aerial stability.
Key specifications of an ESC
The components making up the propulsion system of a drone are tightly coupled and critical. The motors, flight controller, ESC, and LiPo battery pack must be compatible. Let us assume that you already have bought the motors, a compatible battery, and a flight controller for your DIY drone. Now, it’s time to choose the ESCs. Consider these specifications first.
Current rating: this is the amount of current the ESC can handle safely and the first thing to be aware of when selecting an electronic speed controller — and it can be tricky to determine. The desired current rating depends on the drone motor and the propeller. The motor has a rated current. Most BLDC motors have a peak current at startup three times or more than the rated current. The higher the size of the motor and its KV rating, the greater the current. Larger or heavier propellers also increase the current drawn by the motors. When a motor spins, if the current drawn by it goes higher than what ESC can handle, the ESC will overheat and eventually burn out.
ESCs have two current ratings, continuous and burst. The current rating indicated on the ESC sticker is the continuous current rating. It’s the maximum continuous current that an ESC can typically handle. The burst current rating is the maximum current that an ESC can tolerate for a few seconds. If the current drawn by the motor exceeds the burst current rating and persists for longer (> 10 seconds), the ESC will burn out. The burst current rating is always higher than the continuous current rating.
An ESC’s typical continuous current ratings are 6A, 10A, 20A, 30A, and 35A. The 6A and 10A ESC are suitable for toy and mini drones with smaller and lighter propellers. Generally, these drones are powered by two or three-cell LiPo batteries. The 30A or 35A ESCs are suited for larger drones with five-inch propellers or one powered by five or six-cell LiPo batteries.
The 30A and 35A ESCs are of similar weight, but the 35A ESC provides better reliability and durability. As a thumb rule, the ampere rating of ESCs must be at least 10~15% higher than the drone motor’s maximum current at full throttle. If the motor’s rating is 20A at full throttle, the continuous current rating of the ESC must be at least 25A.
Many ESCs have an onboard temperature sensor to avoid overheating and prevent the drone from flying close to objects with high thermal conductivity.
Drone motors rarely, if ever, draw the maximum rated current. The maximum current typically drawn always remain 20~30% less than the maximum rated current. If the maximum current drawn at full throttle by a motor is 20A at ground conditions, it will usually draw a maximum current of 15~16A during flight.
There are two reasons for it. During a flight, drone motors rarely operate at full throttle. The rotation speed varies in seconds to maintain orientation and follow the instructed direction. Secondly, the motors and ESC experience a cooling effect due to airflow during flight.
It’s important that the ESC’s current rating not be unnecessarily higher than the drone’s requirements. If a drone only requires 20A ESC, adding a 35A ESC won’t hinder operation, but it will add extra weight and size to the drone.
Input voltage rating: the maximum voltage rating of an ESC is also important. While some ESCs are rated for 3S-4S LiPo batteries, others can handle a 6S LiPo battery. If the voltage from the battery pack is higher than the maximum voltage rating of the ESC, both the ESC and motor can get damaged. If a motor is powered by a high voltage battery pack, the current drawn to deliver the same power is reduced.
So, if a high-voltage ESC is selected, the overall power output is increased. A high-voltage drone can fly faster than a low-voltage drone. The voltage spikes from the battery pack are always higher than its rated voltage. This is why, many makers prefer 6S ESC because of the higher voltage tolerance.
Weight and size: typically, the higher the current rating of the ESC, the heavier the drone — and vice versa. The lighter the drone, the better…but there are trade-offs. The lower-current ESCs are of lighter weight, but they usually provide lower performance and lower heat dissipation (which can lead to overheating).
A high-current ESC offers better performance and cooling, but it will be larger in size and weight. Typically, single ESCs weigh around 4~6 grams, and a 4-in-1 ESC weighs about 12~15 grams. If a drone’s frame has thin or short arms, the size of a single ESC must not exceed 1~2mm of the arm’s dimensions. For quadcopters, a 4-in-1 ESC is an ideal option that’s available in 6A~35A ratings and easily fits beneath the flight controller, regardless of the size.
ESC firmware: the firmware determines the performance of an ESC. It also supplies information about the supported ESC protocols and configuration interfaces.
Some popular ESC firmware includes BLHeli_S ESC, BLHeli ESC, BLHeli_32, KISS, and SimonK ESC.
- SimonK is an older open-source ESC firmware that’s now outdated. So, it’s best to avoid it.
- BLHeli and BLHeli_S are open-source ESC firmware. BLHeli is now outdated but still used by some ESCs. BLHeli_S is a second-generation BLHeli from BusyBee Processors. It comes with PWM hardware for smooth motor control and supports 1-2ms input signals with Oneshot125, Oneshot42, and Multishot.
- BLHeli_32 is a third-generation BLHeli with a closed-source code, requiring a license fee. It’s based on a 32-bit microcontroller that provides higher processing capability, lower latency, and higher update rates for input signals.
- KISS is a closed-source ESC firmware that runs only on KISS ESCs.
ESC protocols: these are similar to the operating system in a computer. The protocols determine how an ESC and flight controller communicate with each other. They also impact the performance and stability of the drone.
The most popular ESC protocols include Standard PWM, Oneshot125, Oneshot42, Multishot, Dshot, and Proshot. Proshot is the latest ESC protocol, while standard PWM is the earliest. The ESC protocol determines the language and rules in which the ESC and flight controller will communicate. It also determines the speed and frequency of the communication between the two.
The standard PWM takes 1000~2000 us to communicate a data packet, Oneshot125 takes 125~250 us, Oneshot42 takes 42~84 us, Multishot takes 5~25 us, and Dshot takes 13.4~106.8 us. Multishot is by far the fastest ESC protocol.
ESC processor: there are three main families of processors (microcontrollers) that are used in ESC multiplexers: ATMEL 8-bit, SILAB’s 8-bit, and ARM Cortex 32-bit controllers. The first ATMEL’s 8-bit controllers were commonly used and compatible with SimonK and BEHeli. Eventually, they were outperformed by SILAB’s 8-bit controllers, which are only compatible with BELHeli and BLHeli_S. More recently, the ARM Cortex 32-bit controller is typically used, and it supports BHeli_32.
Single or 4-in-1 ESC: A single or 4-in-1 ESC can be used when building quadcopters. But it’s cleaner and more convenient to use the 4-in-1 ESC.
The 4-in-1 offers clean wiring, a centralized weight, and easy installation, and it generally comes with onboard voltage regulators that can be used for power distribution. However, if one of the ESCs on the 4-in-1 is damaged, the entire board must be replaced. The single ESCs keep the design modular and are more affordable. When mounting single ESCs, expect more wiring and adjust the center of mass. For drones other than quadcopters, single ESCs are more suitable.
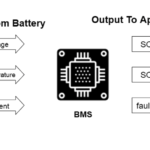
With or without BEC: BEC stands for battery elimination circuit. An ESC with a BEC can power other components in the drone, such as the RF receiver, servos, flight controller, and other 5V components. This eliminates the need for extra battery packs on the drone and reduces the weight. Nowadays, most flight controllers come with a separate power module sufficient to power the RF receiver, rudder, and flight controller. In such cases, a BEC on ESC is not required.
There are two types of BEC on ESCs, linear and switched. A linear BEC is cheaper but only has 25% power efficiency. Switched BECs are more costly but provide 85% power efficiency. So, it’s worth verifying if the BEC included on an ESC is linear or switched. It’s also important to check the current rating of the BEC. It must be higher than the total current consumption of all receivers and servos. For smaller drones, 1.5~2A BEC is enough. For medium-sized drones, 3A BEC is suitable. The large drones need a 5A BEC.
Battery limitations: if a smaller battery pack like 3S-4S is selected for a drone, it can discharge early due to internal resistance. The voltage can drop to the discharge limit as more current is drawn from the battery. The battery could also discharge before reaching the ESC’s maximum current rating. Therefore, the size of the LiPo battery can limit the time of flight and maximum altitude the drone can fly. For a greater time of flight, a large battery (like the 6S) is preferred — and an ESC with a higher current rating must then be selected.
Responsiveness: today, many ESCs have active braking support that improves the drone’s responsiveness. An ESC with transistors or dedicated gate drivers (the ideal choice) typically has better responsiveness. It should also include PWM hardware.
ESC thrust: the thrust produced by a quality ESC is usually 20~30% higher than a less costly or effective one. The thrust produced on motors primarily depends on the ESC. The other factors that can affect the thrust production on motors include:
- The quality of the solder joints
- The efficiency of the ESC’s heat sink
- The quality of the drone
Buying ESC from reputed manufacturers is recommended rather than searching for cheaper alternatives.
Capacitors: one of the final things to be checked is the low-ESR capacitors in the ESC’s power distribution board. These capacitors play an essential role in protecting the drone components from voltage spikes. The capacitors also help in canceling the electronic noise in FPV video signals.
How to choose an ESC?
First, determine the motor and LiPo battery configurations for your drone. Next, decide whether a single or 4-in1 ESC is ideal. Both types of ESCs have different advantages and disadvantages. Then, you can shortlist ESCs from reputed manufacturers based on current and voltage ratings. This will automatically determine the size and weight of your ESC, which you must ensure is compatible with your drone design.
Finally, you can select an ESC based on the processor, firmware, and supported protocols. These factors are crucial in the cost determination of the ESC. If the flight controller has a separate power module, you must look for an ESC with a BEC. An ESC with switched BEC will be costlier but more power efficient. The choice of an onboard processor, firmware, ESC protocol, and the BEC will depend on the drone’s expected performance, quality, and longevity, as well as your budget.
You may also like:


Filed Under: Tech Articles

Questions related to this article?
👉Ask and discuss on Electro-Tech-Online.com and EDAboard.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.