The circuit presented here rotates stepper motor and varies its RPM (speed). It does not use any micro controller (or micro processor) or any programmable digital device also it does not require any software program to generate sequence of pulses. It drives stepper motor using simple, easily available and commonly used components and ICs like IC555, decade counter, OR gate, current driver chip etc. That is why the name given simple stepper motor driver.
[[wysiwyg_imageupload:13379:]]
Fig. 1: Prototype of Simple Stepper Motor Driver using 555 Timer IC Circuit on Breadboard
As shown in the circuit diagram the circuit is implemented using following chips
1. IC555 – Used to generate sequence of pulses with variable frequency
2. Decade Counter CD4017 – Used to divide the frequency of pulses generated by IC555 and generate different frequency pulse trains like f/2, f/4, f/8 … etc
3. OR Gate 74LS32 – It is used to generate 4 pulse trains of frequencies f/2, f/4, f/8 and f/16
4. Current Driver ULN2003 – Used to amplify output current of OR gates to drive stepper motor coils
IC555 is configured in astable mode. Its RC timing components are R1, R2, R3 and C1. Pot R3 is used to vary frequency of output pulses. The values are selected such that output frequency varies from 2 Hz to 3 Hz. ( the frequency variation is very low because the RPM variation is multiplied by 60 so RPM variation will be 120 to 180)
Output of IC555 is connected to clock input of counter CD4017. If input frequency is F the counter will generate 10 outputs with F, F/2, F/4, F/8 ….. likewise.
Out of these 10 outputs, 8 outputs are given as inputs to 4 OR gates of 74LS32 that they will generate only 4 outputs with F, F/2, F/4, and F/8. Like as shown in figure, 1st output is given to one input of 1st OR gate, 2nd output is given to one input of 2nd OR gate and likewise 3rd output and 4th output to 3rd and 4th OR gate respectively. 5th output is again given to second input of 1st OR gate and likewise remaining 6th, 7th and 8th outputs are given to rest of gates.
The outputs or all 4 OR gates are given to inputs of ULN2003A. ULN2003A has darlington pairs inside which drives the stepper motor coils.
Circuit Operation
The circuit operation can be explained better with the help of following waveforms.
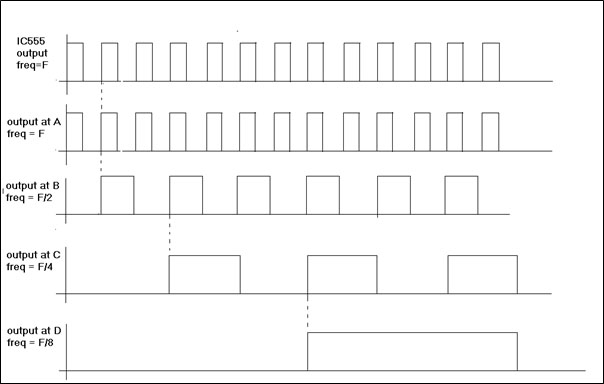
Fig. 2: Image showing Circuit Operations in Waveform
IC555 generates pulses at frequency F shown as 1st waveform. When it is applied to decade counter it generates 10 pulse trains of frequencies F, F/2, F/4, F/8 likewise. Because 1st and 5th output are given to 1st or gate inputs, its final output at A is of frequency F shown as second waveform. Similar to that 2nd and 6th outputs of counter are given as inputs to 2nd OR gate so its output at B will be F/2. Likewise outputs C and D are of frequency F/4 and F/8. When these outputs are given to stepper motor coils through ULN2003A chip the stepper motor will start rotating. As we change the frequency of IC555 using pot from 2 Hz to 3 Hz the RPM of motor changes from 120 RPM to 180 RPM.
Circuit Diagrams

Project Components
Project Video
Filed Under: 555 Timers, Electronic Projects
Filed Under: 555 Timers, Electronic Projects

Questions related to this article?
👉Ask and discuss on EDAboard.com and Electro-Tech-Online.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.