Summary:
This Project is to design and implement an Ultrasonic Vehicular Parking Aid Display, which notifies the driver about obstacles coming in the way of parking. In light of the emerging traffic situation where parking space is at a premium such a device can be very useful and also facilitate parallel parking easily. The implementation of the idea with the ultrasonic sensor interfaced with Arduino and the technical details of this project follows later.
Here you will get idea about the programming of the Arduino to interface with CAN Controller (MCP2515) to act as a transceiver. Here two Arduino are used, one is for sensing the distance using Ultrasonic sensor and another one is to display the values received through the CAN BUS.
Description:
Prerequisites & Equipment:
You will need the following:
-
Two Arduino Board or Arduino clone (Here is a guide if you need)
-
A 5v TTL -UART Bluetooth module.
-
LCD and Ultrasonic Sensor (HC-SR04).
-
Arduino IDE for the programming.
-
Two CAN Transceiver.
Working Principle:
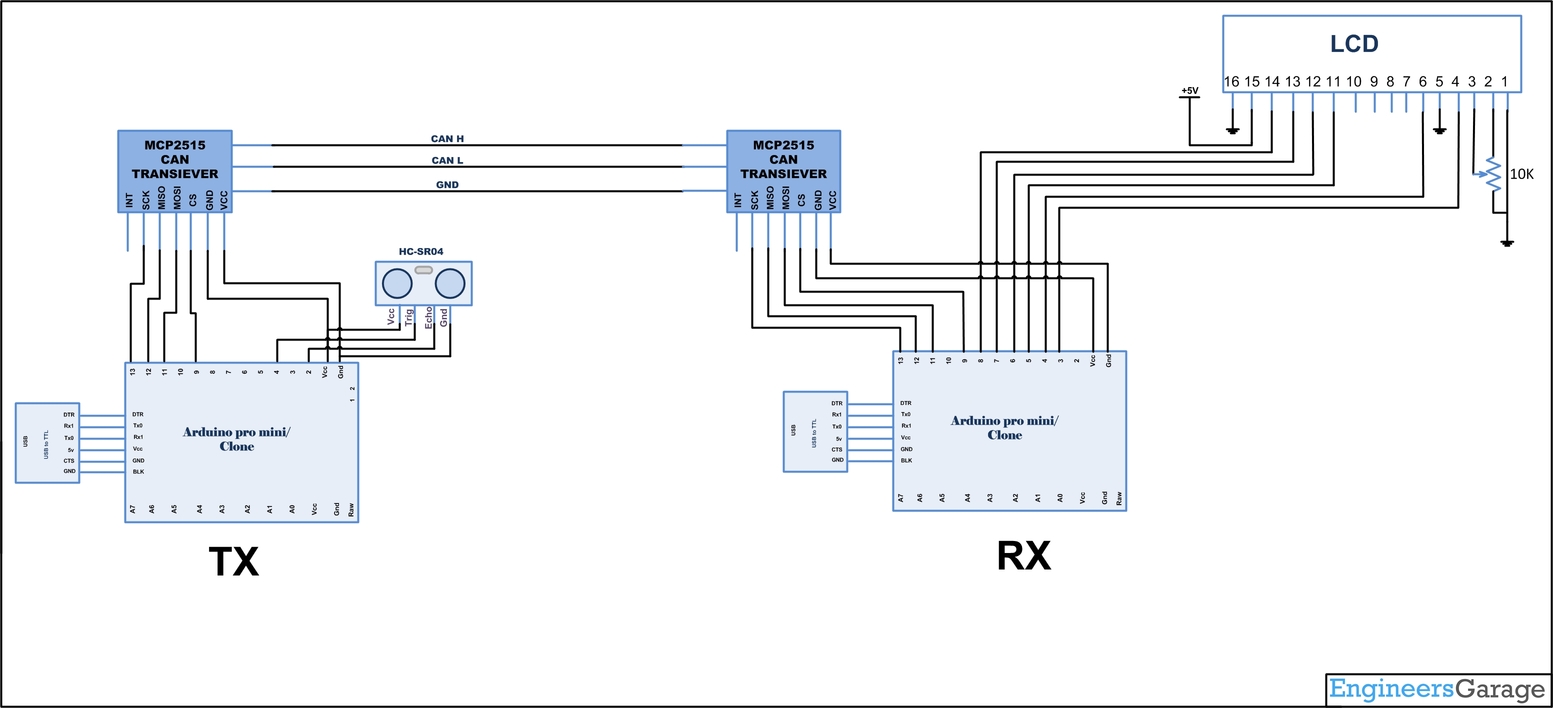
This Project includes two distinct parts, transmitter section and a receiver section. Receiver section consists of an Arduino and LCD to show the Distance of obstacle received from the CAN Bus. The Transmitter section consists of the Ultrasonic sensor interfaced with Arduino. The communication between both sections are carried out by the MCP2515 CAN transceiver.

Fig. 1: Block Diagram Arduino based Car Reverse Guidance System
We are using HC-SR04 ultrasonic sensors on the transmitter side placed in the rear side of the vehicle, used to get the distance measurement. The HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like bats do. It offers excellent non-contact range detection with high accuracy. The range of Measurement is 2cm to 400 cm or 1” to 13 feet. It operation is not affected by sunlight or black material. It comes in module with ultrasonic transmitter and receiver.
Features:
-
Power Supply :+5V DC
-
Quiescent Current : <2mA
-
Working Current: 15mA
-
Effectual Angle: <15°
-
Ranging Distance : 2cm – 400 cm/1″ – 13ft
-
Resolution : 0.3 cm
-
Measuring Angle: 30 degree
-
Trigger Input Pulse width: 10uS
-
Dimension: 45mm x 20mm x 15mm
Wiring:
Pins:
-
VCC: +5VDC
-
Trig : Trigger (INPUT)
-
Echo: Echo (OUTPUT)
-
GND: GND
Connect the sensor to the Arduino as shown below
HC-Sr04 Arduino
Pin 1 Vcc
Pin 2 GPIO 4
Pin 3 GPIO 2
Pin 4 Gnd
Running the program:
Load the program TX.ino after you save it onto your computer and open it in Arduino IDE .
-
Compile the program in the Arduino IDE
The following function is used to send the values to the CAN bus. Detailed instruction can be found here.
CAN.sendMsgBuf(0x70,0, 2, stmp);
Receiving CAN data and displaying in an LCD:
Load the program RX.ino after you save it onto your computer and open it in Arduino IDE .
-
Compile the program in the Arduino IDE
The following function is used to receive the values from the CAN bus and to display in an LCD. Detailed instruction can be found here.
CAN.readMsgBuf(&len, buf);
Loading software for Arduino:
If you are new to Arduino you can start with here. You have to start with the Arduino IDE (Integrated Development Environment) from Arduino . Download the code from below link and upload it to the Arduino board.
The operation of the system is as follows:
-
The DISPLAY processor that waits for the current distance message send from the COLLECTOR processor over the CAN bus.
-
The COLLECTOR processor measure the distance, formats it, and sends to the DISPLAY processor over the CAN bus.
-
The DISPLAY processor reads the message from the CAN bus and then displays it on the LCD which is repeated every second.
Hardware assembly:

Fig. 2: Prototype of Arduino Robot demonstrating Car Reverse Guidance System

Fig. 3: Image showing CAN Transmitter and Receiver mounted over Arduino Robot Car
Fig. 4: Image showing CAN Receiver Module mounted on Arduino Robot Car

Fig. 5: Image showing Ultrasonic Sensor and CAN Transmitter Module mounted on Arduino Robot Car
Make the circuit as is given by the circuit diagram. Make the circuit with your selected parts and connect the motors to the circuit.
You may also like:



Circuit Diagrams
Project Video
Filed Under: Electronic Projects
Filed Under: Electronic Projects

Questions related to this article?
👉Ask and discuss on Electro-Tech-Online.com and EDAboard.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.