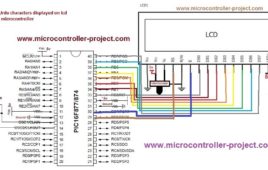
In this project i am going to display urdu language characters on 16×2 lcd using pic16f877 microcontroller. Urdu is a language spoken in Pakistan, India and Bangladesh. Character lcd’s generally contains a Hitachi HD4478 controller in it. Hd4478 only contains ASCII character set in it and we can only display the predefined characters that are present in it. It…
What are the top development boards for AI and ML?

Machine learning (ML) and artificial intelligence (AI) are no longer limited to high-end servers or cloud platforms. Thanks to new developments in integrated circuits (IC) and software technology, it’s possible to implement ML algorithms and deep learning neural networks on tiny controllers and microcomputers. And these embedded devices installed at edges must no longer rely…
What to expect from microcontrollers in 2023
Microcontrollers are the workhorse behind most embedded systems. They serve as a compact integrated circuit (IC) designed to govern a specific operation in an embedded system. The programmable firmware used in these tiny computers is ideal for and fits well into several applications. Microcontrollers are neither too specific, like application-specific integrated circuits (ASICs), nor too…
How to achieve longer MCU battery life with low power sleep mode

There are generally six power modes in an MCU: Run: In full run mode, an MCU consumes full current. This mode is best suited for applications where power efficiency is not essential. Doze: As we know, power increases proportionally to the frequency. Therefore, we can conclude that higher clock speeds tend to higher power consumption.…
Microchip adds to its 8-bit PIC and AVR microcontroller family

With smartphones, autonomous vehicles, and 5G wireless connectivity dominating the landscape of embedded design in 2022, Microchip’s 8-bit PIC and AVR microcontroller (MCU) families are gaining market share. Over the past 50 years, the market for 8-bit MCUs has grown steadily and Microchip currently sells one device for every human in the western hemisphere each…
What is an embedded system?
If we look around, we will find ourselves to be surrounded by computing systems. Every year millions of computing systems are built destined for desktop computers (Personal Computers, workstations, mainframes and servers) but surprisingly, billions of computing systems are built every year embedded within larger electronic devices and still goes unnoticed. Any device running on electric power either already has computing system or will soon have computing system embedded in it.
FPGA vs microcontrollers: Another approach to embedded design

Most engineers start their journey in embedded systems with microcontrollers. With microcontrollers, one gets a complete miniature computing system on a single integrated circuit. The CPU, RAM, ROM and Input / Output peripherals all on a single thumb size SoC. This very popular approach to learning embedded design and development is in fact just the one side of the complete picture. Working with microcontrollers (and microprocessors) is all about software-based embedded design.
10 Noteworthy Apps for Electronics Designers

With the rapid use of smartphones and tablets around the globe, apps have become an inseparable part of our lives. Not only we tend to use them for entertainment but these are also quite useful for educational as well as professional purposes. This wide spectrum of users also includes people belonging to the field of electronics ranging from beginners to professionals.There are different apps which provide access to important information regarding the materials, tools, calculations and notable theoretical knowledge involved in the electronics projects.
How to measure voltage of multiple batteries connected in string/array in series or parallel combination with microcontrollers
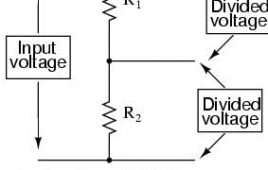
Measuring an individual battery voltage or a whole bank of battery using any microcontroller(arduino, microship pic, Avr, Atmega, Intel, NXP, stm32)is an easy task. You can find many tutorials on internet on how to do so. But what about if we want to measure an individual battery connected to a cluster of batteries in series…
Microchip xc8 compiler place data in ram specific location/address of pic microcontroller

This tutorial is about placing data in a specific ram(random access memory) location/address using xc8 compiler and mplabx ide. I am using microchip pic16f877 8-bit microcontroller in this tutorial. It has 8KB of rom (read access memory) and 368 Bytes of ram(random access memory). Its generally not recommended to place data in data memory(ram). Since data…
How to build a calculator using Pic16f877 microcontroller

Calculator with Pic 16f877 microcontroller is a comprehensive project. Comprehensive in the way that code is lengthy and logical. It will be hard for newbies to understand the code and circuit components interface with pic microcontroller. I will try to explain each and every thing about code and circuit thoroughly. The project covers all the aspects…
Measuring Temperature using LM74 temperature sensor by Texas Instruments and Pic18f452 Microcontroller

In this post i am going to interface LM74 temperature sensor with Pic18f452 microcontroller. LM74 is a temperature sensor by Texas Instruments. It comes with an SPI (Serial Peripheral Interface) interface. You can operate it in SPI (Serial Peripheral Interface) mode. A processor/microcontroller can read temperature reading from LM74 at any time. LM74 provides resolution of up to…
Display custom characters on 16×2 lcd using Microchip Pic16f877 Microcontroller

Here is a simple project on how to build/generate/make custom characters in 16×2 lcd and then print/display them on lcd using microchip pic16f877 microcontroller. Character lcd contains a set of ascii characters and some Chinese characters in their controllers. We invoke the ascii characters present in the ram for displaying them on lcd. But if…
Toggle/Blink led on specific delay with pic microcontroller using timers: MPLABX and xc8 compiler

This is advance tutorial on blink/toggle led with pic microcontroller using pic microcontroller timers. I am going to teach you how to toggle led on specific delay time generated using timers of pic micrococntroller. This tutorial is not limited to only toggling led, it can be utilized at many other places. Like generating an event…
PicKit2 clone designed and manufactured at home

PicKit2 is a programmer designed by Microchip to program its pic microcontrollers. PicKit2 supports many 8-bit pic microcontroller series. PicKit2 supports almost all Pic-10/12/16/18/24 and dspic-30/33 flash series microcontroller’s. Pickit 2 is an ICSP (In-circuit serial programmer) programmer. In icsp interface, microcontroller can be programmed while its working in the circuit. An icsp programmer uses 5…
One Second Delay Generation by using internal Timers of Microchip Pic Microcontroller, xc8 compiler with Mplabx Ide

While working with microchip pic microcontrollers i came across a situation where custom delay is required in seconds. I was working with pic18f4580 microcontroller, Mplabx ide and xc8 compiler. I know that __delay_ms() and __delay_us() macros do exists for generating delays. But i want to see how the timer configuration is done for one second delay.…
Interfacing Lcd(8×1,8×2,10×1,10×2, 16×2, 16×4, 20×1, 20×2, 40×1,40×2) in 4 Bit Mode with Microchip Pic16f877A Microcontroller
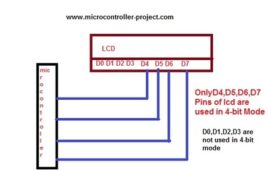
In this project i am going to interface 16×2 lcd display in 4-bit mode with Microchip Pic16f877 microcontroller. We can interface any size of character lcd display (8×1,8×2,10×1,10×2, 16×2,16×2,16×4,20×1,20×2,40×1,40×2 etc) in 4-bit mode with pic microcontrollers. In 4-bit interface mode only 4 lcd data lines are used to display data on lcd screen. Usually lcd is…
Displaying Scrolling(Moving) text on 16×2 lcd Using Pic16f877 and Pic18f452 Microcontroller
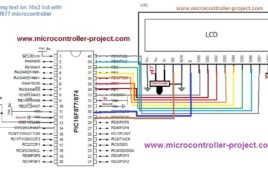
Displaying moving or scrolling text on lcd(16×2,8×1,16×4,8×2,16×1,20×1,20×2 etc) is very easy using any microcontroller. You just need to know how to efficiently use 16×2 lcd commands. In this project i am using pic 16f877 microcontroller to display text and then scroll it on the 16×2 lcd. The lcd which i am using is 16×2. Where…
Push Button as Input and Led as Output with Pic Microcontroller

This is a simple tutorial/project on how to interface a transistor (2n2222), led and push button with Pic microcontroller. In the project i am going to switch on and off(blink) an led with the help of a push button. Since transistors are used at outputs we can drive heavy loads with the same circuit. Pic16f877…
Interfacing Graphical LCD(GLCD-JHD12864E) with Microchip PIC16f877 Microcontroller

In this post/tutorial i am going to teach you how to interface graphical lcd jhd12864E with microchip pic16f877 microcontroller. I am going to display my website name “www.microcontroller-project.com” and a special pattern that displays thick lines on dotted graphical lcd display. In graphical lcd name “jhd12864” the number 128×64 means lcd has 128 coulombs and…