
The embedded software or firmware is the brain of an embedded device. However, this type of software works differently than the conventional ones on PCs or mobile devices — which are generic and work identically on such operating systems. PC software runs without directly accessing the underlying hardware. The purpose of embedded software works in…
Un-interruptible Bench-top DC Power Supply With Display
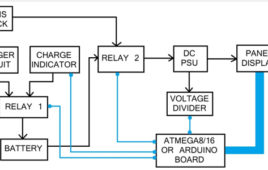
This tutorial explains how to make your own power supply unit for all your electronics and embedded system experiments. It also has a backup battery which will be used in case of power cuts and a display.
What is the 1-Wire protocol?
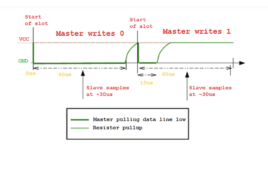
The 1-Wire protocol is a single-wire interface, half-duplex, bidirectional, low-speed and power, long-distance serial-data communication protocol. Although this protocol is classified as a 1-wire standard, at least two wires are required in the 1-wire standard bus — one for the data and/or power supply and another for the ground return. An additional wire might be…
Microchip adds to its 8-bit PIC and AVR microcontroller family

With smartphones, autonomous vehicles, and 5G wireless connectivity dominating the landscape of embedded design in 2022, Microchip’s 8-bit PIC and AVR microcontroller (MCU) families are gaining market share. Over the past 50 years, the market for 8-bit MCUs has grown steadily and Microchip currently sells one device for every human in the western hemisphere each…
What is an embedded system?
If we look around, we will find ourselves to be surrounded by computing systems. Every year millions of computing systems are built destined for desktop computers (Personal Computers, workstations, mainframes and servers) but surprisingly, billions of computing systems are built every year embedded within larger electronic devices and still goes unnoticed. Any device running on electric power either already has computing system or will soon have computing system embedded in it.
FPGA vs microcontrollers: Another approach to embedded design

Most engineers start their journey in embedded systems with microcontrollers. With microcontrollers, one gets a complete miniature computing system on a single integrated circuit. The CPU, RAM, ROM and Input / Output peripherals all on a single thumb size SoC. This very popular approach to learning embedded design and development is in fact just the one side of the complete picture. Working with microcontrollers (and microprocessors) is all about software-based embedded design.
ATtiny85 microcontroller tutorials, Part 1: Introduction
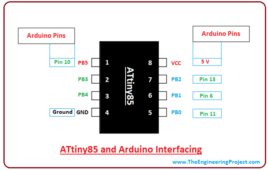
ATtiny85 microcontroller is a very popular 8-bit RISC microcontroller. It has become the first choice for professionals and developers because of its incredible features in such a small size. As its name suggests, it’s a tiny 8-pin (PDIP) microcontroller with almost all required features that any microcontroller should have such as built-in FLASH, EEPROM, SRAM,…
New MPLAB cloud tools offer secure workflow to PIC & AVR microcontrollers

Microcontroller (MCU) design is now easier than ever with Microchip Technology‘s new MPLAB cloud tools ecosystem available for PIC and AVR devices. The free, all-in-one cloud platform combines easy, integrated search and discovery of example code, graphical configuration of projects, and code debugging in a collaborative environment. This environment enables enterprise-scale rapid development while simplifying…
Controlling a BLDC Motor with an ESC

Brushless motors have much more satisfying results as compared to brushed motors. The basic difference between them is that in a brushless motor, the rotor itself contains the permanent magnets and the electromagnets move to the stator which is quite opposite as seen in a brushed motors. It’s more precise and can also factor the speed of the motor into the equation. This makes brushless motors more efficient. There is no sparking and much less electrical noise. There are no brushes to wear out. With the electromagnets on the stator, they are very easy to cool. You can have a lot of electromagnets on the stator for more precise control. The only disadvantage of a brushless motor is its higher initial cost, but you can often recover that cost through the greater efficiency over the life of the motor.
How to measure voltage of multiple batteries connected in string/array in series or parallel combination with microcontrollers
Measuring an individual battery voltage or a whole bank of battery using any microcontroller(arduino, microship pic, Avr, Atmega, Intel, NXP, stm32)is an easy task. You can find many tutorials on internet on how to do so. But what about if we want to measure an individual battery connected to a cluster of batteries in series…
Interfacing triple-axis accelerometer with AtMega16

This project makes use of three out of the eight ADCs present in AtMega16 IC to display the corresponding digital data of X, Y and Z outputs of an accelerometer on 16X2 LCD.It’s very easy to deal with such kind of modules as they just need the VCC and GND supply to get started, rest it is its job to provide us the analog data.These modules work on simple concept like that of force acting on an object at inclined plane. It deals with the Mg(sin ?) and Mg(cos ?) part of the force and calculate the angle ? for further calculations. Now it also notices the change in force from which acceleration will be calculated.
Arduino Vs Raspberry Pi: How to select between the two?

This is a common dilemma among electronics community of engineers whether they are DIY hobbyists or professionals working on a prototype. There may be a case that one might have worked on some microcontrollers and now willing to propel the academic excellence by working on development boards or do one needs to choose a development board for a do-it-yourself engineering project. Let’s have a fundamental understanding of both the boards to make clear which to select.First thing is that both Arduino and Raspberry Pi offer a range of development boards with different specifications and features.
Fingerprint Detection using Microcontroller- (Part 45/46)

In today’s secure world biometric safety is on the top. Unlike other techniques which make use of passwords and numbers, that are needed to be remembered, biometric techniques make use of human body parts like fingerprints or even iris of your eyes and as we know that these things are unique to all thus it makes biometric systems the most effective over others. In this project I have interfaced a very popular fingerprint scanner R305 with AtMega 16 microcontroller. This module communicates over UART protocol with microcontroller i.e. it makes use of Rx and Tx pin of microcontroller to interact with it.
Mobile – Gesture Controlled Car

Have you ever wondered of operating a toy car with you own mobile phone? Yes I have made such a thing. This project involves the communication between your mobile phone and the car. Here I have used the internal accelerometers of the mobile phone to operate my toy car.The system communicates wirelessly over Bluetooth interface, thus we require a phone with Bluetooth compatibility. Moreover I have made an Android Application for the same task therefore the phone must have ANDROID operating system J
Coin Operated Timer Control Power Supply Box to Control AC Appliances

Saving electricity is a major concern for domestic and industrial units. We always try hard to save electricity in many ways to reduce our electricity bills, but due to some known and unforeseen circumstances our efforts do not normally transform in saving electricity. Adding to our woes we may at times forget to switch off electrical gadgets when we are not using them, especially the AC’s, which not only results in mounting electricity bills, but also forget the fact that we are wasting a resource which is of National Importance.
Audio Tone Generator using AVR Microcontroller
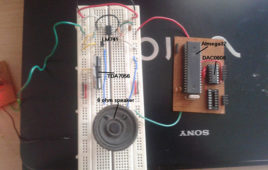
The circuit presented here demonstrates how to generate Audible Frequency from an AVR Microcontroller. The output of Microcontroller is always digital so to generate audible sound at the outset first it needs to be converted into Analog. A DAC (Digital to Analog Converter) is used for this purpose. Microcontroller generates sine wave of Audible Frequency using DAC. This sine wave is further given to Audio Amplifier that drives speaker. Microcontroller generates sine wave of fix frequency continuously. So we can hear an audible tone of fix frequency
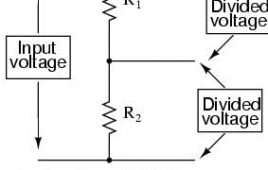
Variable Power Supply with LCD
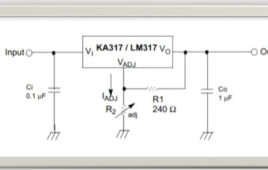
Are you an electronic hobbyist? Then an adjustable power supply is a must for your various needs. This project explains how to make a LM317 based adjustable power supply unit with a digital display
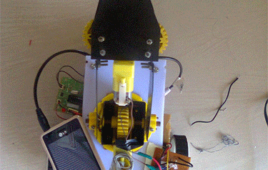
Light Tracker Demonstration
Electricity is the most required and important element of human life. We cannot imagine our day to day life without electricity. Electricity is generated using conventional (coal, diesel) and non conventional (water, wind, sunlight) energy sources. The recent and latest trend is to generate electricity from solar energy. The solar panel (made up of solar-photovoltaic cells) converts solar energy in to electrical
Cell Phone Controlled Pick and Place Robot
Although, the appearance and capabilities of robot vary vastly, all robots share the feature of a mechanical, movables structure under some form of control. The control of robot involves three distant phases: perception, processing, action. Generally, the preceptors are sensors mounted on the robot, processing is done by the on board microcontroller and the task is performed using motors or with some other actuators.In the project the pick and place robot is controlled by a mobile phone that makes a call to the mobile phone attached to the robot. In the course of a call, if any button is pressed a tone corresponding to the button pressed is heard at the other end called ‘Dual Tone Multiple frequency’ (DTMF) tone. The robot receives these tones with help of phone stacked in the robot. The received tone is processed by the microcontroller with the help of DTMF decoder IC MT8870. These IC sends a signals to the motor driver IC l293d which drives the motor in directions forward, reverse, left, right, pick, release, up, down, rotate left, rotate right.
GSM Based Intruder Alerting System
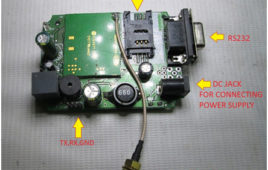
Did you know that most of the thefts at home happen when it is empty? But not everyone is rich enough to hire a security for their house and at the same time they themselves cannot be at home 24 by7. Now what if there is a system which alerts you about an intruder through a text message?The following tutorial teaches how to make you own intruder alerting system