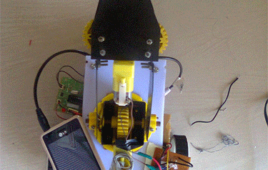
In this project, we’ll design an omnidirectional, moving pick-and-place robot. First, let’s cover how the robot is built. The robot’s build As shown in Figure 1, the robot consists of two sections: An omnidirectional moving platform A robotic arm The omnidirectional platform The robot is built using one circular wooden plate, three dc gear motors,…
Android Phone Controlled Robot using Arduino
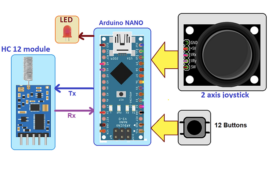
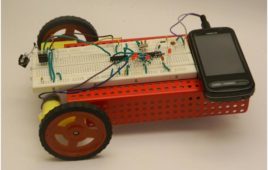
The Android phone that stays in your hand most of the time is useful in many other applications apart from Whatsapp, Facebook; appliances; monitor your health parameters. How it would be if it can control a Robot, which can assist in your daily work. With this project you can make a robot that can be controlled by an Android Phone, over Bluetooth Communication.The robot is built around Arduino interfaced with a Bluetooth receiver to receive commands from Android Phone.The basic Block diagram of the system is as:The operation being very simple, as the app on the phone transmits data serially over a Bluetooth connection established between it and the receiver.The commands are received and are processed according to the program fed into Arduino, upon which the further controlling is done. Motors are given instructions, in the way user commands them through his phone.
STMicroelectronics supports STEM initiatives with REV Robotics’ “Switchback” Battlebot

STMicroelectronics, a global semiconductor provider serving customers across the spectrum of electronics applications, announced that it is contributing multiple STM32 microcontrollers (MCUs) to the “Switchback” battlebot. The 250-pound battlebot, which uses a dual-motor drum spinner mounted on a fully-ambidextrous arm, is designed for durability and serviceability — as well as to win robot battles by hitting…
Computerized Pick n Place Robot
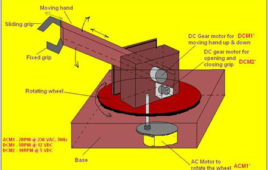
Complete robot is combination of three subsections: Robotic mechanism, Hardware driver circuit, controlling software in VC++.Obviously, the main part will be the mechanism that actually forms the body of robot means moving hand that picks or places any object. Function of hardware driver circuit is to drive all three motors and actuates all the motions of robot. Controlling software is also an important part of this robot because it will take care of all controlling actions. The main functions of this section are: Rotate the hand to one specific angle from where the object should be picked or to be placed, Move the hand up or down to pick or place the object, and Open or close the grip of hand depending upon size of object.
STMicroelectronics designs first LoRa system-on-chip for smarter farming
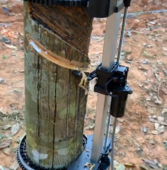
STMicroelectronics, a global semiconductor provider serving customers across the spectrum of electronics applications, has announced a design win for STM32WLE5 — the world’s first LoRa System-on-Chip (SoC). The customer application, developed by automated rubber-tapping specialist CIHEVEA, uses the low-power networking to revolutionize the automation of extracting latex from rubber trees. CIHEVEA has equipped more than 200,000…
Flashlight Controlled Solar Powered Robot using Arduino

This project is a Light gradient sensitive Robot with Solar charging capabilities, in other words it seeks out the light to charge itself. It accomplishes this behavior with a set of Four Light sensitive Photo Resistors in voltage divider circuits. The Arduino unit reads the four values which correspond to the intensity of the light received by the sensors through its analog read pins. It then applies a high voltage across a reed switch which completes a circuit between a 9v battery, and two Toy Motors, resulting in turning or moving towards the light.These motors were not able to be activated directly with the Arduino, if you get small enough motors, the switching portion of this project may be omitted without loss of functionality. If any of the four Photodiodes is registering much higher than the others, it detects which Photodiode is receiving the heightened signal and turns or moves in that direction for as long as the heightened signal is being received.
Cell Phone Controlled Robot Without Microcontroller: Step by Step Guide
Cell phone operated Robot is a Robot whose movement can be controlled by pressing the number of cell phone. The robot can move forward, backward, right or left which depends on the numbers you are pressing. The property of Robot to operate by the cell phone helps you to operate the robot from some distance.The Cell Phone controlled Robot uses DTMF (Dual tone-multi frequency) module. It is capable of receiving a set of command (instructions) in the form of DTMF (Dual tone multiple frequency) tones and performs the necessary actions.
Computerized wireless Pick and Place Robot

This is the most advance version of “Pick and Place Robot” perhaps and most popular and widely used in recent industries. A person from a remote place can comfortably control the motion of robotic arm without any wire connection. Again there are two systems one at the transmitter side in which a software program written…
Mobile-controlled robot

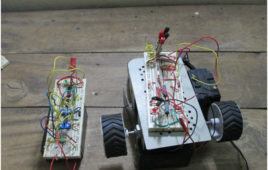
Mobile controlling is done mainly with DTMF decoder. DTMF stands for Dual Tone Multi Frequency. This module can take up-to 4 bits of data at a time (i.e. 0-15 decimal values).DTMF needs two mobile platforms, one for sending instructions while another for receiving them. This module contains a IC which decodes the signals received and convert it into 4 bit data.
Accelerometer Controlled Robot without a Microcontroller
You may have come across many tutorials about accelerometer controlled wireless robot (also known as gesture controlled or glove controlled) but all of them would have a microcontroller. This tutorial teaches you how to make them without using any microcontroller.
Basic Mechanics of Robots
The meaning of this word deals with the motion of the ROBOT. In basic mechanics we will try to understand motors, gear mechanism and physical structure of a robot. Depending upon area of uses ROBOT size may differ from each other. It should have the proper equipment to complete or perform a task. Like we have hands, fingers and arm to hold a thing similarly our ROBOTs require. Our hand, fingers and arm move at a certain angle and in a certain direction which is known as degree of freedom. For movement, our body contains several joints likewise we provide joints in robots too. At joints we fix different types of motor for movement. These motors can be servo, DC geared and stepper.
Wireless monitoring and controlling rescue robot using Zigbee

The robot is operated through PC using wireless technology using zigbee and using wireless camera we can view both audio and video on the TV. This robot has a high power LED which acts as a light source when light intensity inside the pipe is low .It is a low cost robot used to monitor the changes of different parameters in the industrial pipes. By connecting temperature sensor to the robot we can get the temperature of dangerous zones in PC itself. By connecting smoke sensor to the robot we can get the information related concentration of smoke or gases in respective fields.
Step by Step: Line Follower Robot Without Microcontroller

Line follower is an autonomous robot which follows either black line in white are or white line in black area. Robot must be able to detect particular line and keep following it. For special situations such as cross over’s where robot can have more than one path which can be followed, predefined path must be followed by the robot.Line following is a task in which robot has to follow the line. It must be capable of taking various degrees of turns to follow the curved lines also.The Line following Robot moves to follow a line drawn on the floor. This Robot follows the black line which is drawn over the white surface .
Cell Phone Controlled Pick and Place Robot
Although, the appearance and capabilities of robot vary vastly, all robots share the feature of a mechanical, movables structure under some form of control. The control of robot involves three distant phases: perception, processing, action. Generally, the preceptors are sensors mounted on the robot, processing is done by the on board microcontroller and the task is performed using motors or with some other actuators.In the project the pick and place robot is controlled by a mobile phone that makes a call to the mobile phone attached to the robot. In the course of a call, if any button is pressed a tone corresponding to the button pressed is heard at the other end called ‘Dual Tone Multiple frequency’ (DTMF) tone. The robot receives these tones with help of phone stacked in the robot. The received tone is processed by the microcontroller with the help of DTMF decoder IC MT8870. These IC sends a signals to the motor driver IC l293d which drives the motor in directions forward, reverse, left, right, pick, release, up, down, rotate left, rotate right.
Obstacle Avoiding Robot Without Microcontroller

Obstacle avoidance is one of the most important aspects of mobile robotics. Without it robot movement would be very restrictive and fragile. Obstacle Avoiding is a task which is used for detecting the objects placed in the path of your robot or any vehicle. So, to protect robot from any physical damages.An obstacle avoiding robot is an intelligent device, which can automatically sense and overcome obstacles on its path. It is developed without micro-controller in order to eliminate critical circuits, difficult programming etc. All you want to do is to just understand the circuit diagram and start doing this robot. This simple technique can be incorporated in wheeled robots to keep them away from damages and accidents Obstacle Avoidance is a robotic discipline with the objective of moving vehicles on the basis of the sensorial information.
Obstacle Avoiding Robot
This circuit describe a simple obstacle avoiding robot which a you can easily make in your homes because it does not contains any complex digital circuitry and this can be made without using any microcontroller. This is an intelligent robot which will automatically detect the presence of obstacle in its path and change the direction of motion accordingly.
Accelerometer Based Hand Gesture Controlled Robot

In many application of controlling robotic gadget itbecomes quite hard and complicated when there comes the part of controlling it with remote or many different switches.Mostly in military application, industrial robotics, construction vehicles in civil side, medical application for surgery. In this field it is quite complicated to control the robot or particular machine with remote or switches, sometime the operator may get confused in the switches and button itself, so a new concept is introduced to control the machine with the movement of hand which will simultaneously control the movement of robot.
Line Following Robot
This circuit describe a simple line following robot which a you can easily make in your homes because it does not contains any complex digital circuitry and this can be made without using any microcontroller. In this circuit the robot the will follow a white line on black surface. This simple circuit is made with the help of single IC that is L293D and few more commonly known components like LDR and LED. LDR which is working as a sensor here. LDR is basically made up of semiconductor material. Semiconductor material has energy band where electrons and holes exist.
Wireless PC Controlled Robot Using Bluetooth

In the previous tutorial I have explained how to setup a basic serial connection between an Atmega16 controller Board and a computer/laptop. In this article we’ll learn how to control a robot using the computer/laptop wirelessly through Bluetooth. Let us start with the hardware assembly part first. It should be simple since we are using a ready-made chassis. Start by attaching the motors and castor wheel to the chassis. The components needed for the project are : Atmega16 development board with 16MHz crystal, Serial Bluetooth Module(AUBTM/HC-05/HC-04/BLUSMIRF), PC/Laptop running Windows XP/7/8, USB Bluetooth(Not required if you laptop/PC has inbuilt hardware), Motor Driver L293D, 2 X 12V 100RPM Geared DC motors, 2 X Wheels, Chassis, Castor wheel, Female jumper wires. Keep on reading to find out how the robot is constructed and what coding does it use to operate.
Dust bot

It is always better to make bots in a set of modules which can be assembled together to form the required bot. For the dust bot there are two things required, first a gripper that can hold the balls and second a vehicle that can take that gripper from one place to another. First of all it is required to make a vehicle that can be controlled by the wired controls. After accomplishing this task we need a mechanism to grab the balls. Further the grip of the grabber should be of such strength that the balls don’t fall of the bot till we reach the finishing end. The movement of the gripper should be bidirectional and quite precise as we require the movement of the gripper in both the directions. The stability is the success of every bot. More the stability in your design better is your bot. Hence, the arm holding the gripper should be properly fixed and shouldn’t be unstable. Therefore, aluminum rods were chosen with clamps for enhanced stability of the gripper. And most important the bot should utilize the off the shelf material and it must be really economic.